





Stworzenie stanowiska prezentacyjnego dla robota EPSON Scara G6
Celem stanowiska było stworzenie aplikacji do gry w warcaby, w której robot wykonuje manewry na szachownicy za siebie i przeciwnika. Użytkownik steruje położeniem swoich pionków poprzez panel operatorski.
Projekt obejmował przygotowanie programu - „mózgu" aplikacji zaprogramowanego w języku SPEL+ oraz interfejsu użytkownika zbudowanego w programie EPSON GUI Builder.
Zbudowanie modelu fabryki napojów w oparciu o środowisko Wonderware ArchestrA IDE oraz kontroler GE PACSystems RX3i

Projekt zawierał zbudowanie modelu dwóch zbiorników, w których znajdowały się produkty do wykonania napoju oraz zbiornik na produkt finalny.
Elementem projektu była także budowa modelu opartego na trzech zbiornikach, w których następowały poszczególne procesy produkcyjne czekolady, jak np. mieszanie. Cały projekt opierał się na środowisku Wonderware MES, w którym można kontrolować stopień wykonania poszczególnych operacji, sterować pracą urządzeń jak również ilością i jakością końcowego wyrobu jakim była czekolada.
Sterowanie falownikiem za pomocą kontrolera PAC i komunikacji Profibus (Opracował Tomasz Szafrański)
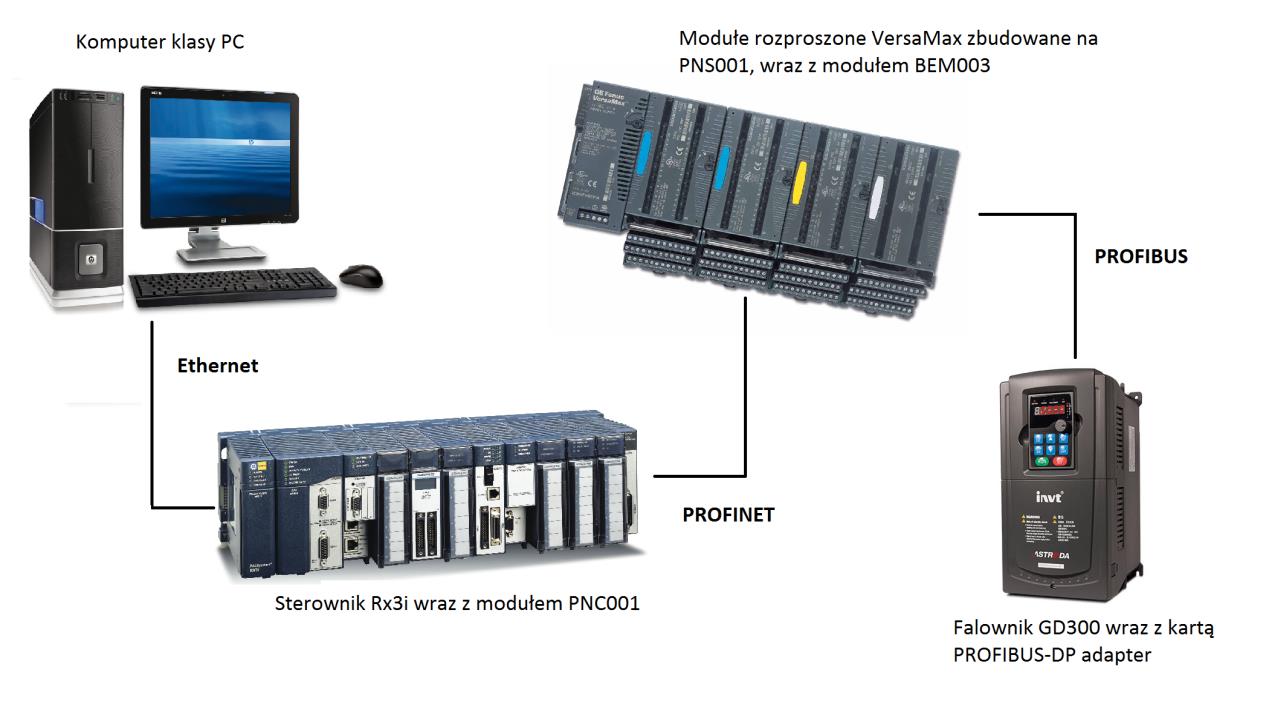 Celem projektu było utworzenie komunikacji pomiędzy kontrolerem GE PACSystems RX3i, oraz falownikiem ASTRAADA serii DRV-27, kontrolny odczyt i zapis przykładowych parametrów falownika (np. częstotliwości, oraz uruchomienia, zatrzymania i kierunku obrotów silnika).
Celem projektu było utworzenie komunikacji pomiędzy kontrolerem GE PACSystems RX3i, oraz falownikiem ASTRAADA serii DRV-27, kontrolny odczyt i zapis przykładowych parametrów falownika (np. częstotliwości, oraz uruchomienia, zatrzymania i kierunku obrotów silnika).
Komunikacja z falownikiem odbywała się poprzez układ wejść\wyjść VersaMax IO, w którym zainstalowana była karta Profibus Master
Stworzenie wizualizacji infrastruktury portu lotniczego, obejmującej jego podstawowe elementy, korzystając z Platformy systemowej ArchestrA (Opracował Marcin Cierniak)
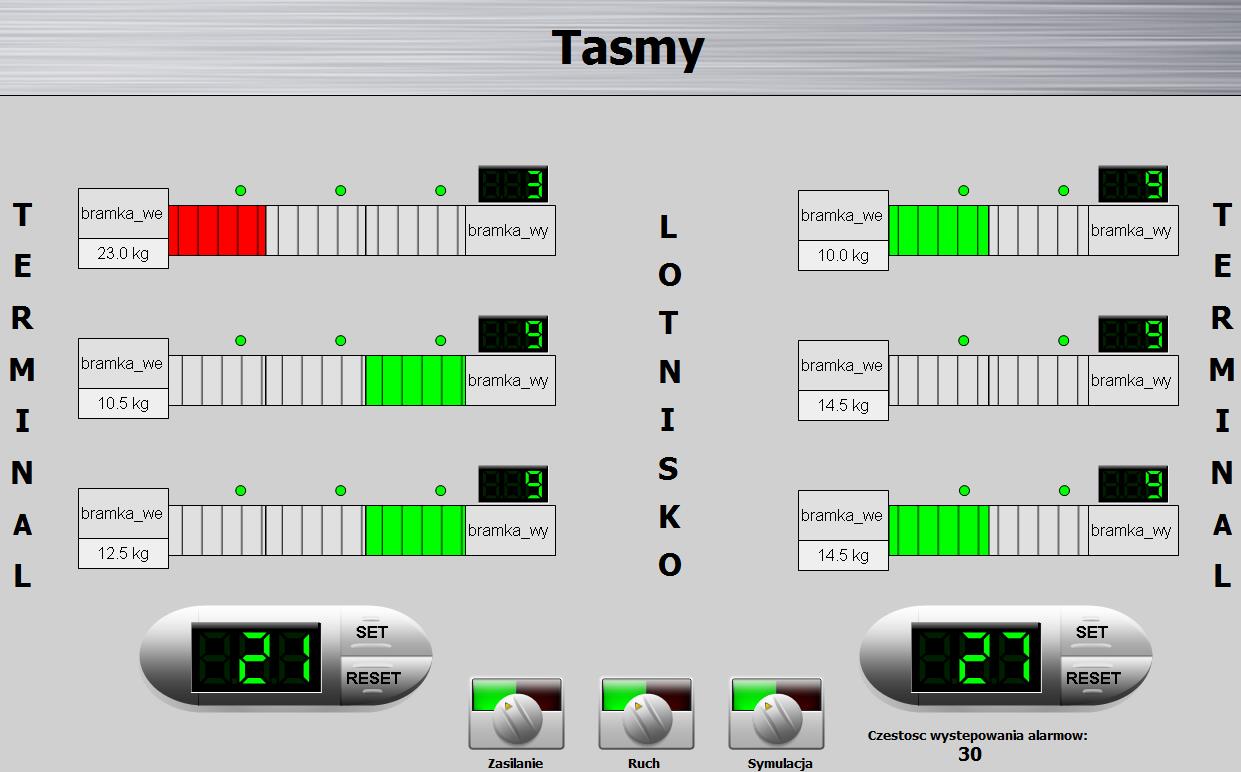 Celem projektu było zaimplementowanie następujących elementów infrastruktury portu lotniczego :
Celem projektu było zaimplementowanie następujących elementów infrastruktury portu lotniczego :
Wykorzystanie urządzenia Leap Motion do sterowania robotem przemysłowym Kawasaki za pomocą gestów

Celem projektu było stworzenie aplikacji umożliwiającej sterowanie robotem Kawasaki za pomocą gestów. Do określania położenia i orientacji dłoni wykorzystane został wykorzystany optyczny czujnik ruchu – Leap Motion.
Zrealizowano aplikację spełniającą następujące założenia:

 Roboty do szkół
Roboty do szkół

 12 428 63 00
12 428 63 00

