


Kurs projektowania symboli Industrial Graphics w oprogramowaniu wizualizacyjnym AVEVA
2026-07-30
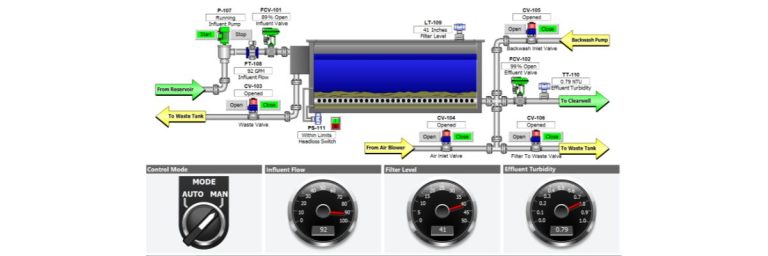
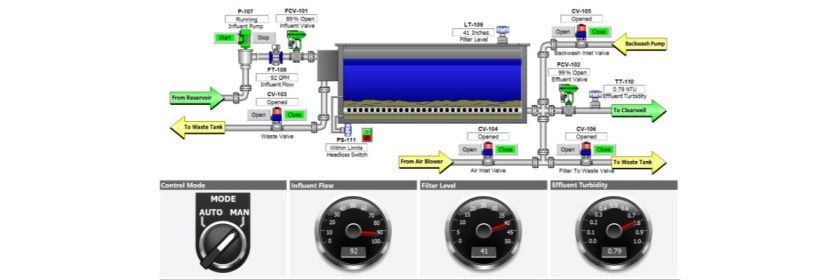
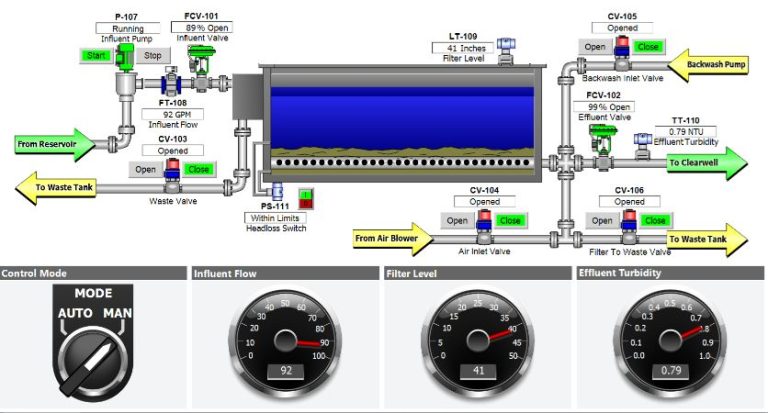
Zapraszamy do kursu projektowania symboli graficznych Industrial Graphics w oprogramowaniu wizualizacyjnym AVEVA. Industrial Graphics to technologia tworzenia obiektów graficznych i wizualizacji, w oprogramowaniu SCADA firmy AVEVA: InTouch HMI, Platforma Systemowa, AVEVA Edge, Plant SCADA.