Obrotniki czyli inaczej pozycjonery spawalnicze jednoosiowe są urządzeniami o napędzie elektrycznym. Służą do obrotu lub przechyłu elementów spawanych na zrobotyzowanym stanowisku spawalniczym. Obrotniki K-Positioners sterowane są z kontrolera robotów Kawasaki Robotics, jako dodatkowe osie.
Obrotniki K-Positioner przystosowane są do pracy w aplikacjach spawalniczych oraz przy technologiach pochodnych (cięcie, frezowanie, wycinanie, wypalanie).
W skład podstawowych zespołów obrotnika wchodzą: serwonapęd i serwowzmacniacz, przekładnia cykloidalna, system przekazu masy spawalniczej, przewody do podłączenia obrotnika do kontrolera robota.
Masa spawalnicza przeniesiona jest na tarczę obrotową za pomocą 2 zespołów szczotek miedzianych zamocowanych na wale przelotowym. Całość układu jest izolowana elektrycznie.
Obrotnik musi być wypoziomowany i stabilnie zamontowany na stanowisku zrobotyzowanym.
Pole pracy stanowiska zrobotyzowanego z obrotnikiem należy zabezpieczyć zgodnie z obowiązującymi polskimi normami bezpieczeństwa. Dostarczany obrotnik K-positioner jest skalibrowany i gotowy do integracji z robotem Kawasaki Robotics.

Kontrolery E0x Kawasaki Robotics charakteryzują się niską wagą i posiadają umiejętność ograniczania strat energii elektrycznej.
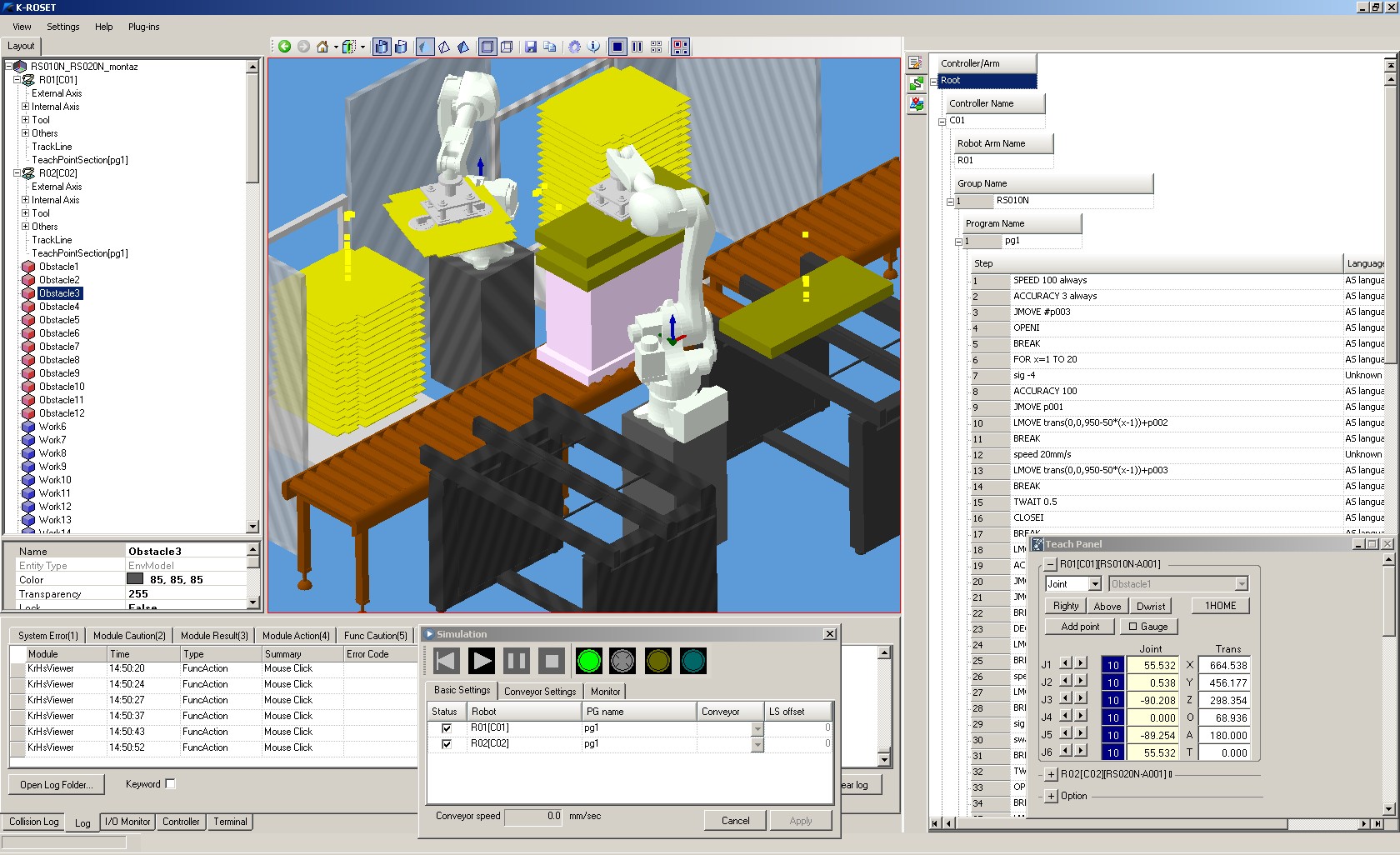
K-Roset to symulator zrobotyzowanych stanowisk pracy z robotami Kawasaki Robotics. W prosty i przejrzysty sposób pozwala na stworzenie symulacji, wykorzystując obrotniki K-Positioner i roboty Kawasaki Robotics.
Program umożliwiający zaawansowaną pracę z robotami Kawasaki Robotics i obrotnikami K-Positioner. Pozwala na realizację komunikacji terminalowej, kompleksowe tworzenie oraz modyfikowanie aplikacji. Posiada wbudowany edytor tekstowy, dzięki któremu można w wygodny sposób tworzyć programy.
CS-Configurator to program umożliwiający konfigurację funkcji bezpieczeństwa dostępnych w module Cubic-S dla obrotników spawalniczych do współpracy z robotami Kawasaki Robotics. Moduł ten odpowiada za monitorowanie ruchu obrotnika i robota – a w sytuacji, w której zostanie zarejestrowany ruch niedozwolony, stanowisko zostanie zatrzymane awaryjnie.

Spawanie zawsze było jednym z głównych zastosowań obrotników i robotów przemysłowych. Zastosowanie obrotnika na stanowisku zrobotyzowanym pozwala zachować powtarzalną jakość produkcji. Sprawia to, że inwestycje w zrobotyzowane spawanie zwracają się szybko.
Czytaj więcej.| Max. payload | 125 kg |
| Degree of freedom | 3 axis |
| Max.diameter of detail | 1020 mm |
| Load ratio between the parties | 100:60 |
| Nominal torque JT2/3 | 167 Nm |
| Max torque JT2/3 | 412 Nm |
| Turning range JT1 | +/-182° |
| Turning range JT2/3 | +/-360°* |
| Max. rotating speed JT1 | 78°/s |
| Max. rotating speed JT2/3 | 180°/s |
| Repeatability | ±0.05 mm |
| Max. offset COG from rotating axis JT2/3 | 100 mm |
| Turning time JT1 (180°) | 3.0 s |
| Max. mass moment of Inertia JT1 - without the inertia of the structure | 502 kgm2 |
| Max. mass moment of Inertia JT2/3 | 60 kgm2 |
| Mass | 895.0000 |
| Max. loading height | 947 mm |
| Installation | Floor |
| Color | NCS S 0510-G50Y & RAL9011 |
| Built-in utilities | Welding ground transfer system |
| Nominal weld current - 100% duty cycle | 500 A |
| Environment cond. | 0÷40°C (Humidity) 35÷85%, no dew |
| Type | Single axis |
| Max. Payload | 250 kg |
| Nominal Torque | 490 Nm |
| Max. Torque | 1200 Nm |
| Max. Tilting Torque | 1450 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 150°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 200 mm |
| Max. Mass Moment of Inertia | 192 kgm2 |
| Mass | 110 kg |
| Default Height of Rotating Axis | 545 mm*** |
| Installation Position | Variable |
| Nominal Weld Current – 100% duty cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted acoustic pressure (adjusted by A) | < 70 dB |
| Emitted acoustic pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis ***the possibility of mounting on a pedestal |
|
| Max. Payload | 230 kg |
| Nominal Torque | 167 Nm |
| Max. Torque | 412 Nm |
| Max. Tilting Torque | 882 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 120°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 102 mm |
| Max. Mass Moment of Inertia | 27.31 kgm2 |
| Mass | 25 kg |
| Default Height of Rotating Axis | 131 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 500 kg |
| Nominal Torque | 950 Nm |
| Max. Torque | 2450 Nm |
| Max. Tilting Torque | 1750 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 150°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 200 mm |
| Max. Mass Moment of Inertia | 330 kgm2 |
| Mass | 142 kg |
| Default Height of Rotating Axis | 545 mm*** |
| Installation Position | Variable |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis ***the possibility of mounting on a pedestal |
|
| Max. Payload | 460 kg |
| Nominal Torque | 415 Nm |
| Max. Torque | 1030 Nm |
| Maximum Bending Moment | 1675 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 120°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 102 mm |
| Max. Mass Moment of Inertia | 58.49 kgm2 |
| Mass | 55 kg |
| Default Height of Rotating Axis | 158 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 1000 kg |
| Nominal Torque | 1960 Nm |
| Max. Torque | 4900 Nm |
| Max. Tilting Torque | XXX Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 120°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 130 mm |
| Max. Mass Moment of Inertia | 1200 kgm2 |
| Mass | 400 kg |
| Default Height of Rotating Axis | 975 mm*** |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis ***the possibility of mounting on a pedestal |
|
| Max. Payload | 900 kg |
| Nominal Torque | 790 Nm |
| Max. Torque | 1960 Nm |
| Max. Bending Moment | 2160 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 110°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 85 mm |
| Max. Mass Moment of Inertia | 190.82 kgm2 |
| Mass | 70 kg |
| Default Height of Rotating Axis | 185 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Max. Payload | 1550 kg |
| Nominal Torque | 1080 Nm |
| Max. Torque | 2700 Nm |
| Max. Bending Moment | 2940 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 110°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 85 mm |
| Max. Mass Moment of Inertia | 182.03 kgm2 |
| Mass | 70 kg |
| Default Height of Rotating Axis | 200 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Max. Payload | 180 kg |
| Degree of Freedom | 1 axis |
| Nominal Torque | 265 Nm |
| Max. Torque | 660 Nm |
| Max. Tilting Torque | 980 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 180°/s |
| Repeatability | ±0.05 mm** |
| Max. Mass Moment of Inertia | 113 kgm2 |
| Mass | 280 kg |
| Default Height of Rotating Axis | 702 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Max. Payload | 375 kg |
| Degree of Freedom | 1 axis |
| Nominal Torque | 490 Nm |
| Max. Torque | 1200 Nm |
| Max. Tilting Torque | 1750 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 150°/s |
| Repeatability | ±0.05 mm** |
| Max. Mass Moment of Inertia | 192 kgm2 |
| Mass | 248 kg |
| Default Height of Rotating Axis | 702 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Max. Payload | 750 kg |
| Degree of Freedom | 1 axis |
| Nominal Torque | 950 Nm |
| Max. Torque | 2455 Nm |
| Max. Tilting Torque | 2450 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 150°/s |
| Repeatability | ±0.05 mm** |
| Max. Mass Moment of Inertia | 330 kgm2 |
| Mass | 280 kg |
| Default Height of Rotating Axis | 702 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
 |
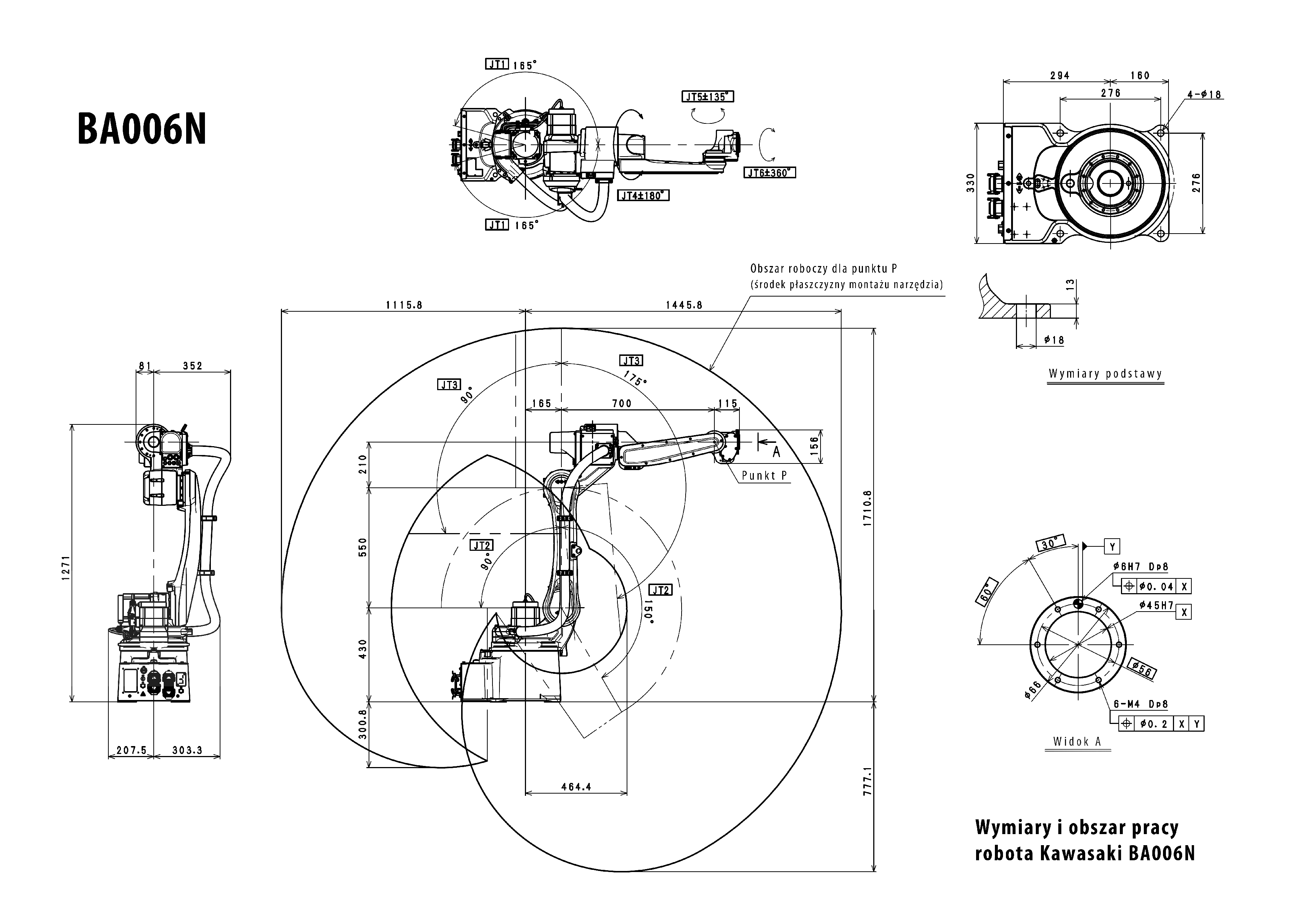
Opis robota:Nowy robot spawalniczy Kawasaki BA006N pozwala realizować sprawnie większość procesów spawalniczych w przemyśle. Konstrukcja ramienia robota pozwala wykonać spawanie w ciasnych przestrzeniach lub spawanie bardzo skomplikowanych kształtów. Smukłe ramię, przelotowy nadgarstek (hollow wrist) oraz zintegrowane przewody poprowadzone wewnątrz ramienia robota sprawiają, że może spawać każdy kształt i położyć precyzyjnie każdą spoinę. Kontroler tego robota dostarczany jest w wersji pozwalającej na sterowanie 7 osiami z możliwością dołożenia 2 kolejnych. |
Przestrzeń robocza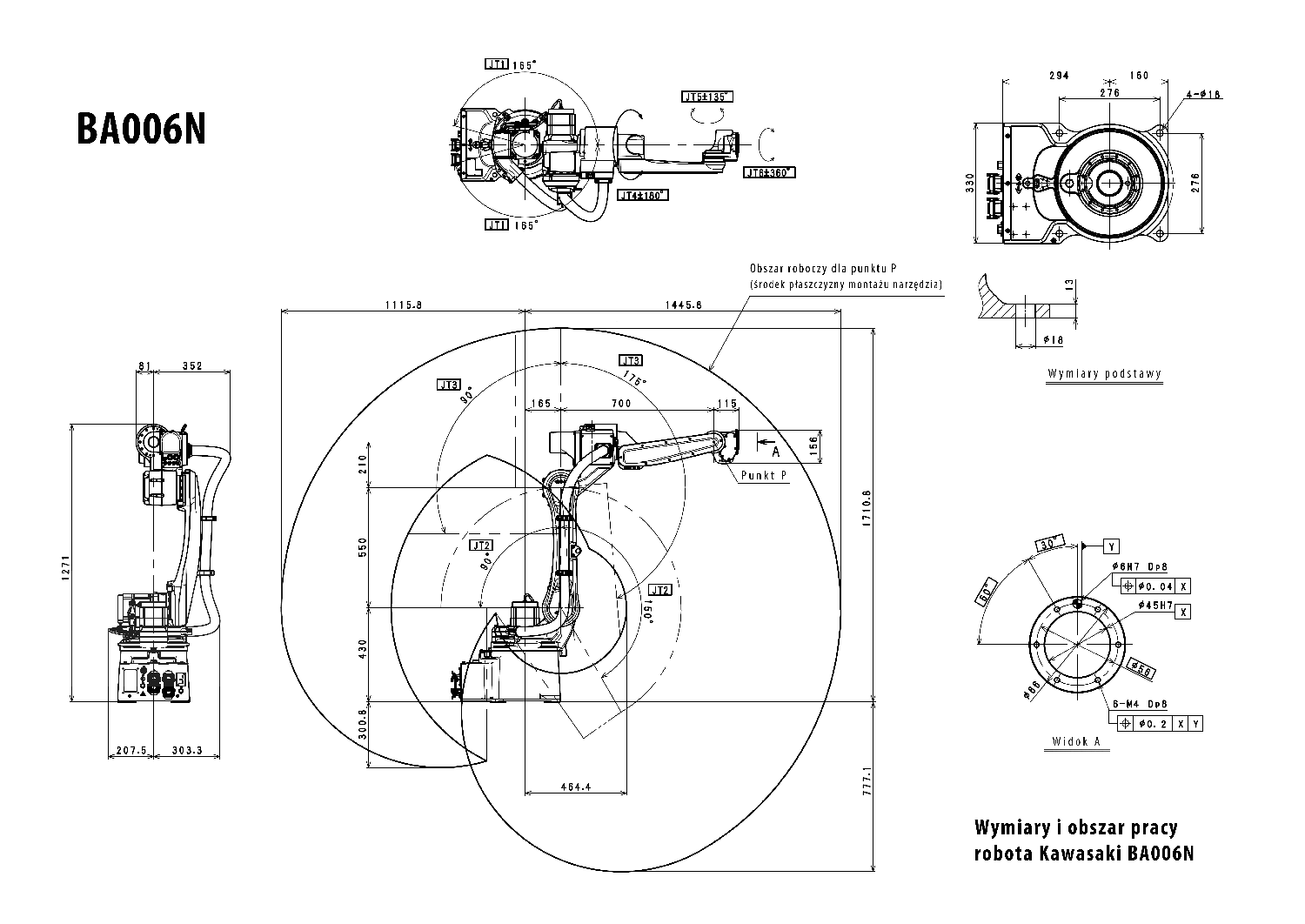 Pobierz obrazek w wysokiej rozdzielczości |
| BA006N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1445 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 165 |
| JT2 | +150 ~ -90 |
| JT3 | +90 ~ -175 |
| JT4 | +/- 180 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 240 |
| JT2 | 240 |
| JT3 | 220 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 650 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E01 |
| Stopień Ochrony IP | IP65 |
|
Opis robota:Nowy robot spawalniczy Kawasaki BA006N pozwala realizować sprawnie większość procesów spawalniczych w przemyśle. Konstrukcja ramienia robota pozwala wykonać spawanie w ciasnych przestrzeniach lub spawanie bardzo skomplikowanych kształtów. Smukłe ramię, przelotowy nadgarstek (hollow wrist) oraz zintegrowane przewody poprowadzone wewnątrz ramienia robota sprawiają, że może spawać każdy kształt i położyć precyzyjnie każdą spoinę. Kontroler tego robota dostarczany jest w wersji pozwalającej na sterowanie 7 osiami z możliwością dołożenia 2 kolejnych. |
Przestrzeń roboczaPobierz obrazek w wysokiej rozdzielczości |
| BA006N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1445 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 165 |
| JT2 | +150 ~ -90 |
| JT3 | +90 ~ -175 |
| JT4 | +/- 180 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 240 |
| JT2 | 240 |
| JT3 | 220 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 650 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E01 |
| Stopień Ochrony IP | IP65 |
|
Opis robota:Nowy robot spawalniczy Kawasaki BA006N pozwala realizować sprawnie większość procesów spawalniczych w przemyśle. Konstrukcja ramienia robota pozwala wykonać spawanie w ciasnych przestrzeniach lub spawanie bardzo skomplikowanych kształtów. Smukłe ramię, przelotowy nadgarstek (hollow wrist) oraz zintegrowane przewody poprowadzone wewnątrz ramienia robota sprawiają, że może spawać każdy kształt i położyć precyzyjnie każdą spoinę. Kontroler tego robota dostarczany jest w wersji pozwalającej na sterowanie 7 osiami z możliwością dołożenia 2 kolejnych. |
Przestrzeń roboczaPobierz obrazek w wysokiej rozdzielczości |
| BA006N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1445 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 165 |
| JT2 | +150 ~ -90 |
| JT3 | +90 ~ -175 |
| JT4 | +/- 180 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 240 |
| JT2 | 240 |
| JT3 | 220 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 650 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E01 |
| Stopień Ochrony IP | IP65 |
|
Opis robota:Nowy robot spawalniczy Kawasaki BA006N pozwala realizować sprawnie większość procesów spawalniczych w przemyśle. Konstrukcja ramienia robota pozwala wykonać spawanie w ciasnych przestrzeniach lub spawanie bardzo skomplikowanych kształtów. Smukłe ramię, przelotowy nadgarstek (hollow wrist) oraz zintegrowane przewody poprowadzone wewnątrz ramienia robota sprawiają, że może spawać każdy kształt i położyć precyzyjnie każdą spoinę. Kontroler tego robota dostarczany jest w wersji pozwalającej na sterowanie 7 osiami z możliwością dołożenia 2 kolejnych. |
Przestrzeń roboczaPobierz obrazek w wysokiej rozdzielczości |
| BA006N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1445 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 165 |
| JT2 | +150 ~ -90 |
| JT3 | +90 ~ -175 |
| JT4 | +/- 180 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 240 |
| JT2 | 240 |
| JT3 | 220 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 650 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E01 |
| Stopień Ochrony IP | IP65 |
|
Opis robota:Nowy robot spawalniczy Kawasaki BA006N pozwala realizować sprawnie większość procesów spawalniczych w przemyśle. Konstrukcja ramienia robota pozwala wykonać spawanie w ciasnych przestrzeniach lub spawanie bardzo skomplikowanych kształtów. Smukłe ramię, przelotowy nadgarstek (hollow wrist) oraz zintegrowane przewody poprowadzone wewnątrz ramienia robota sprawiają, że może spawać każdy kształt i położyć precyzyjnie każdą spoinę. Kontroler tego robota dostarczany jest w wersji pozwalającej na sterowanie 7 osiami z możliwością dołożenia 2 kolejnych. |
Przestrzeń roboczaPobierz obrazek w wysokiej rozdzielczości |
| BA006N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1445 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 165 |
| JT2 | +150 ~ -90 |
| JT3 | +90 ~ -175 |
| JT4 | +/- 180 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 240 |
| JT2 | 240 |
| JT3 | 220 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 650 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E01 |
| Stopień Ochrony IP | IP65 |
|
Opis robota:Nowy robot spawalniczy Kawasaki BA006N pozwala realizować sprawnie większość procesów spawalniczych w przemyśle. Konstrukcja ramienia robota pozwala wykonać spawanie w ciasnych przestrzeniach lub spawanie bardzo skomplikowanych kształtów. Smukłe ramię, przelotowy nadgarstek (hollow wrist) oraz zintegrowane przewody poprowadzone wewnątrz ramienia robota sprawiają, że może spawać każdy kształt i położyć precyzyjnie każdą spoinę. Kontroler tego robota dostarczany jest w wersji pozwalającej na sterowanie 7 osiami z możliwością dołożenia 2 kolejnych. |
Przestrzeń roboczaPobierz obrazek w wysokiej rozdzielczości |
| BA006N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1445 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 165 |
| JT2 | +150 ~ -90 |
| JT3 | +90 ~ -175 |
| JT4 | +/- 180 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 240 |
| JT2 | 240 |
| JT3 | 220 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 650 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E01 |
| Stopień Ochrony IP | IP65 |
| Type | Single axis |
| Max. Payload | 250 kg |
| Nominal Torque | 265 Nm |
| Max. Torque | 660 Nm |
| Max. Tilting Torque | 850 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 180°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 105 mm |
| Max. Mass Moment of Inertia | 80 kgm2 |
| Mass | 150 kg |
| Default Height of Rotating Axis | 545 mm*** |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis ***the possibility of mounting on a pedestal |
|
| Max. Payload | 230 kg |
| Nominal Torque | 167 Nm |
| Max. Torque | 412 Nm |
| Max. Tilting Torque | 882 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 180°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 102 mm |
| Max. Mass Moment of Inertia | 27.31 kgm2 |
| Mass | 40 kg |
| Default Height of Rotating Axis | 131 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 500 kg |
| Nominal Torque | 490 Nm |
| Max. Torque | 1200 Nm |
| Max. Tilting Torque | 1450 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 150°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 100 mm |
| Max. Mass Moment of Inertia | 192 kgm2 |
| Mass | 220 kg |
| Default Height of Rotating Axis | 545 mm*** |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis ***the possibility of mounting on a pedestal |
|
| Max. Payload | 460 kg |
| Nominal Torque | 415 Nm |
| Max. Torque | 1030 Nm |
| Max. Tilting Torque | 1675 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 120°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 102 mm |
| Max. Mass Moment of Inertia | 58.49 kgm2 |
| Mass | 90 kg |
| Default Height of Rotating Axis | 158 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 1000 kg |
| Nominal Torque | 950 Nm |
| Max. Torque | 2450 Nm |
| Max. Tilting Torque | 1750 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 150°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 130 mm |
| Max. Mass Moment of Inertia | 192 kgm2 |
| Mass | 280 kg |
| Default Height of Rotating Axis | 545 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Max. Payload | 900 kg |
| Nominal Torque | 790 Nm |
| Max. Torque | 1960 Nm |
| Maximum Bending Moment | 2160 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 110°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 85 mm |
| Max. Mass Moment of Inertia | 190.82 kgm2 |
| Mass | 150 kg |
| Default Height of Rotating Axis | 185 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Max. Payload | 1550 kg |
| Nominal Torque | 1080 Nm |
| Max. Torque | 2700 Nm |
| Maximum Bending Moment | 2940 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 110°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 85 mm |
| Max. Mass Moment of Inertia | 182.03 kgm2 |
| Mass | 150 kg |
| Default Height of Rotating Axis | 200 mm |
| Installation Position | Pedestal / Table |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment cond. | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 2000 kg |
| Nominal Torque | 1960 Nm |
| Max. Torque | 4900 Nm |
| Max. Tilting Torque | 6850 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 110°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 100 mm |
| Max. Mass Moment of Inertia | 1200 kgm2 |
| Mass | 850 kg |
| Default Height of Rotating Axis | 975 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 2000 kg |
| Nominal Torque | 1960 Nm |
| Max. Torque | 4900 Nm |
| Max. Tilting Torque | 6850 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 110°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 100 mm |
| Max. Mass Moment of Inertia | 1200 kgm2 |
| Mass | 580 kg |
| Default Height of Rotating Axis | 355 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 3300 kg |
| Nominal Torque | 3136 Nm |
| Max. Torque | 7840 Nm |
| Max. Tilting Torque | 20000 Nm |
| Turning Range | +/-360°** |
| Max. Rotating Speed | 70°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 105 mm |
| Max. Mass Moment of Inertia | 3200 kgm2 |
| Mass | 1400 kg |
| Default Height of Rotating Axis | 1025 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 250 kg |
| Nominal Torque | 265 Nm |
| Max. Torque | 660 Nm |
| Max. Tilting Torque | 850 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 180°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 105 mm |
| Max. Mass Moment of Inertia | 80 kgm2 |
| Mass | 315 kg |
| Default Height of Rotating Axis | 990 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
| Type | Single axis |
| Max. Payload | 500 kg |
| Nominal Torque | 490 Nm |
| Max. Torque | 1200 Nm |
| Max. Tilting Torque | 1450 Nm |
| Turning Range | +/-360°* |
| Max. Rotating Speed | 150°/s |
| Repeatability | ±0.05 mm** |
| Max. Offset COG from Rotating Axis JT1 | 100 mm |
| Max. Mass Moment of Inertia | 192 kgm2 |
| Mass | 375 kg |
| Default Height of Rotating Axis | 990 mm |
| Installation Position | Floor |
| Nominal Weld Current – 100% Duty Cycle | 500 A |
| Environment conditions | 0-40°C |
| Emitted Acoustic Pressure (adjusted by A) | < 70 dB |
| Emitted Acoustic Pressure (adjusted by C) | < 63 Pa |
|
*possibility of setup range +/-36000 **on radius r=340 mm from rotating axis |
|
|
Opis robota:Nowy robot spawalniczy Kawasaki BA006N pozwala realizować sprawnie większość procesów spawalniczych w przemyśle. Konstrukcja ramienia robota pozwala wykonać spawanie w ciasnych przestrzeniach lub spawanie bardzo skomplikowanych kształtów. Smukłe ramię, przelotowy nadgarstek (hollow wrist) oraz zintegrowane przewody poprowadzone wewnątrz ramienia robota sprawiają, że może spawać każdy kształt i położyć precyzyjnie każdą spoinę. Kontroler tego robota dostarczany jest w wersji pozwalającej na sterowanie 7 osiami z możliwością dołożenia 2 kolejnych. |
Przestrzeń roboczaPobierz obrazek w wysokiej rozdzielczości |
| BA006N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1445 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 165 |
| JT2 | +150 ~ -90 |
| JT3 | +90 ~ -175 |
| JT4 | +/- 180 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 240 |
| JT2 | 240 |
| JT3 | 220 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 650 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E01 |
| Stopień Ochrony IP | IP65 |


 Roboty do szkół
Roboty do szkół



 12 428 63 00
12 428 63 00


{kind=link}