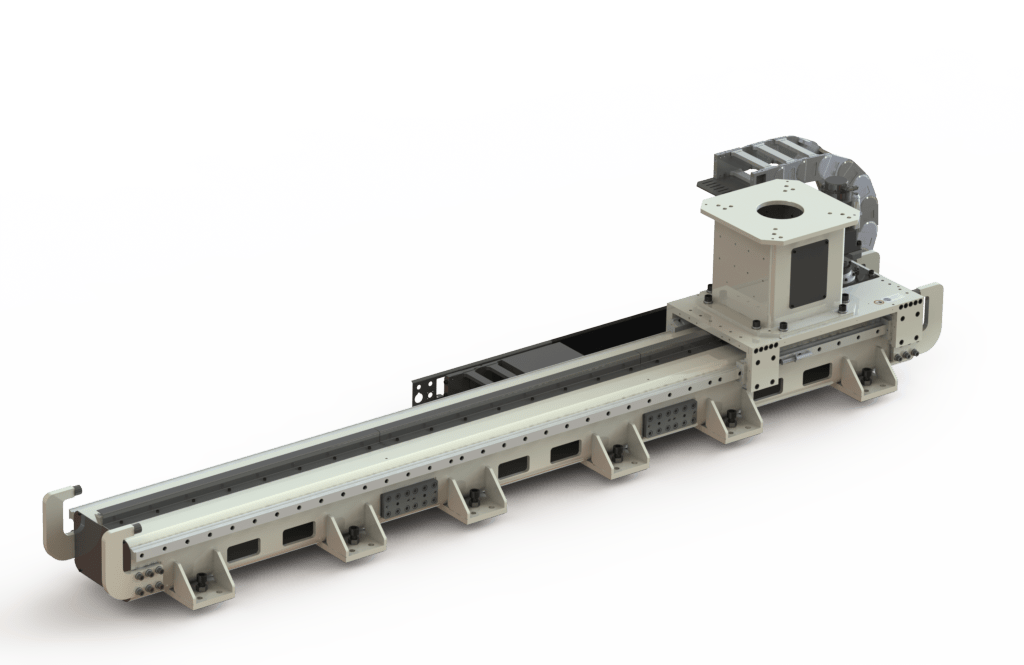
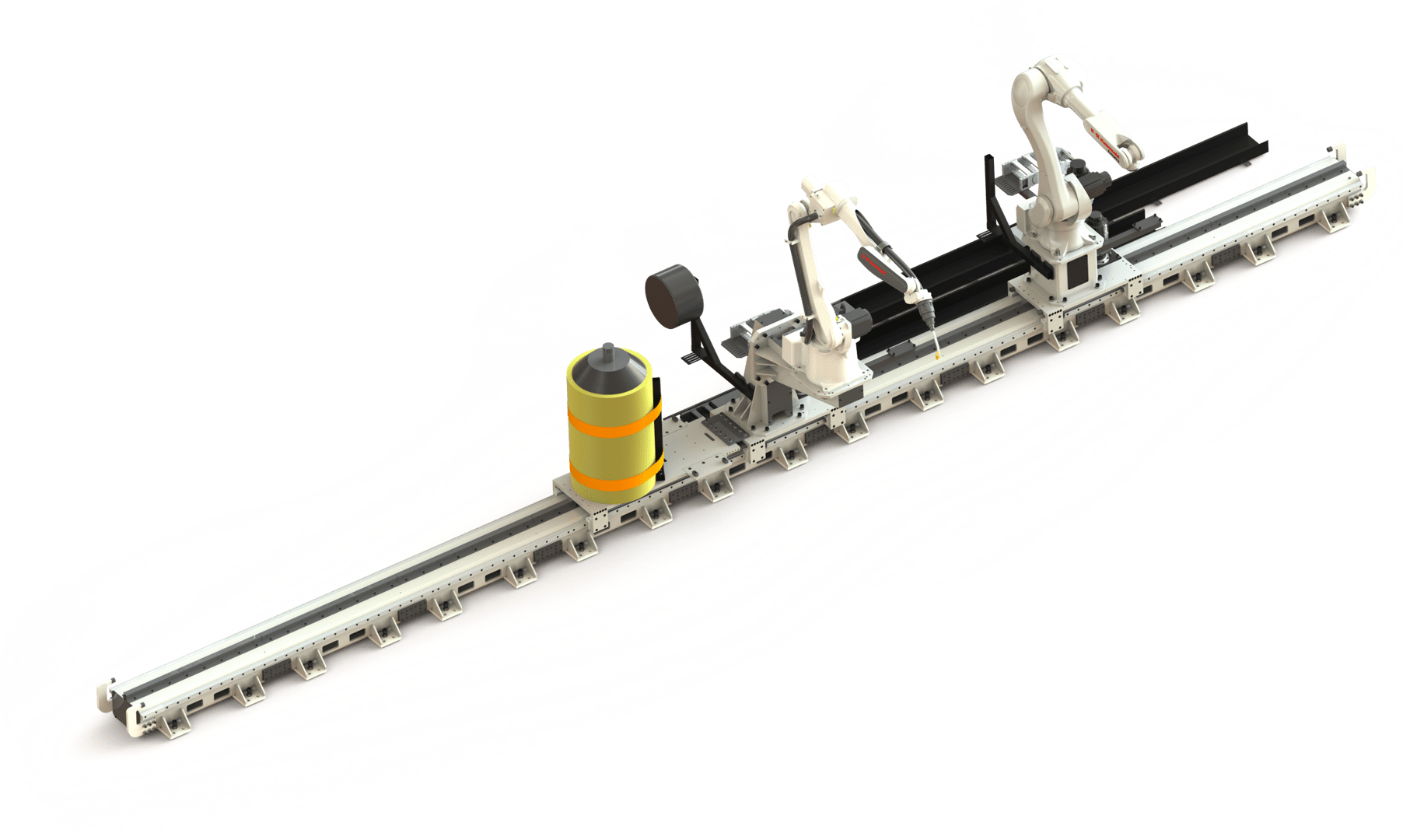
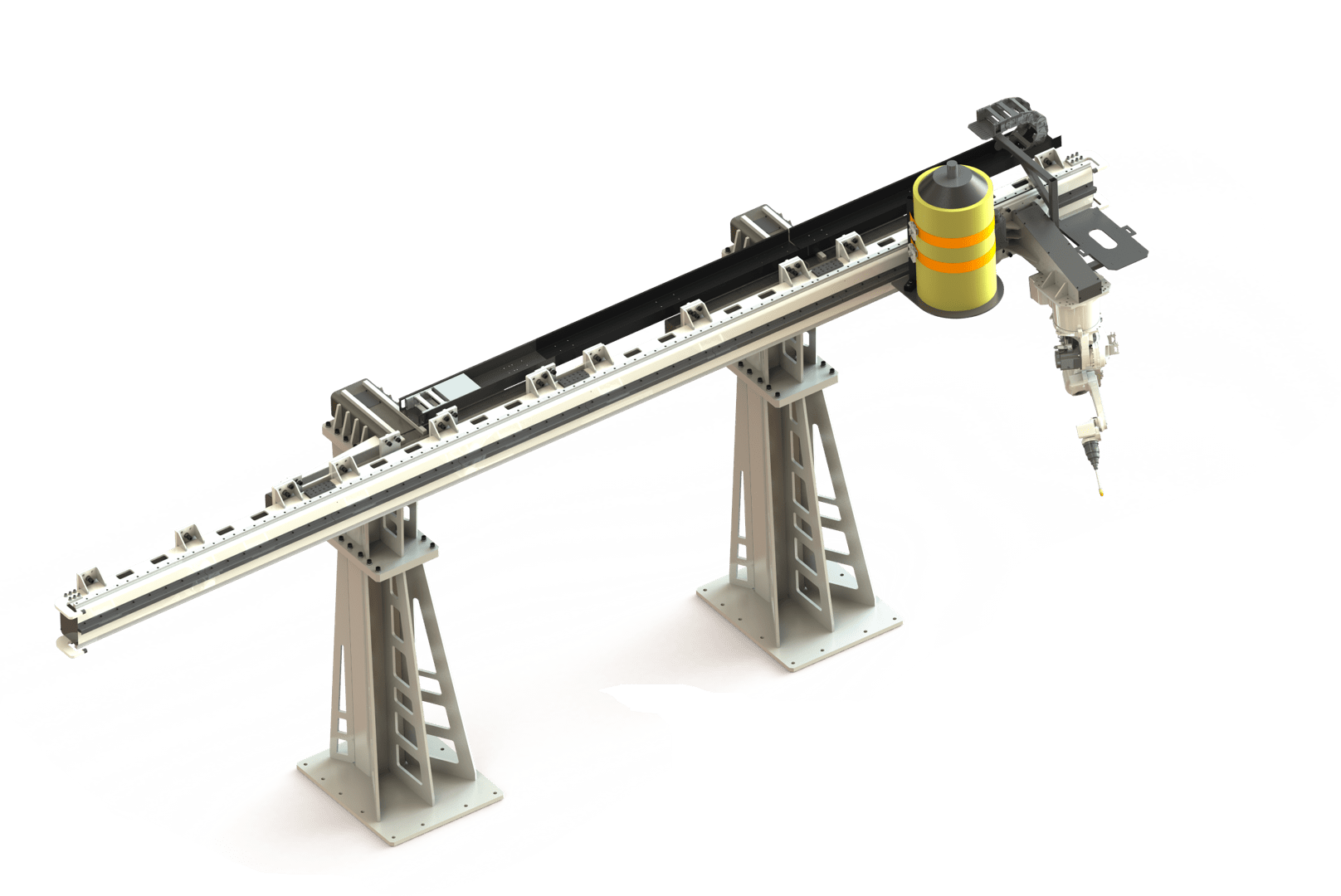
Tor jezdny dla małych i średnich robotów Kawasaki Robotics, występujący w dwóch wersjach: o udźwigu 500 oraz 800kg. Maksymalna długość toru limitowana jest długością przewodów łączących robota z kontrolerem. Długość toru może być zwiększana odcinkami o długości 1 lub 2 metrów. Istnieje możliwość dostarczenia dodatkowych opcji takich jak: postumenty, dodatkowe wózki pod spawarkę lub system automatycznego smarowania listew zębatych.

Tor jezdny K-Track TRK500 przeznaczony do współpracy z robotami Kawasaki Robotics. Występuje w dwóch wersjach podstawowej oraz o zwiększonej ładowności. Tor jezdny zbudowany jest z odcinków jedno- lub dwumetrowych bazujących na stalowych korpusach wraz z prowadnicami liniowymi oraz listwą zębatą z osłonami.
TRK500 wykorzystujący serwonapęd Kawasaki Robotics o mocy 2.0 kW można w łatwy i szybki sposób zintegrować z robotem przemysłowym jako dodatkową oś. Serwonapęd wykorzystuje 17-bitowy enkoder absolutny do ustalania pozycji.
Istnieje możliwość zamontowania dodatkowych opcji do toru takich jak: wózek bierny, postumenty, układ automatycznego smarowania i wiele więcej.
Podstawowe informacje:

Kontrolery E0x Kawasaki Robotics charakteryzują się niską wagą i posiadają umiejętność ograniczania strat energii elektrycznej. Przedni panel kontrolera wyposażony jest w przycisk E-stop, przełącznik Teach/Repeat, oraz włącznik zasilania. Dodatkowo kontroler zawiera porty komunikacyjne takie jak : Ethernet, USB2.0 oraz gniazda RS-232C.
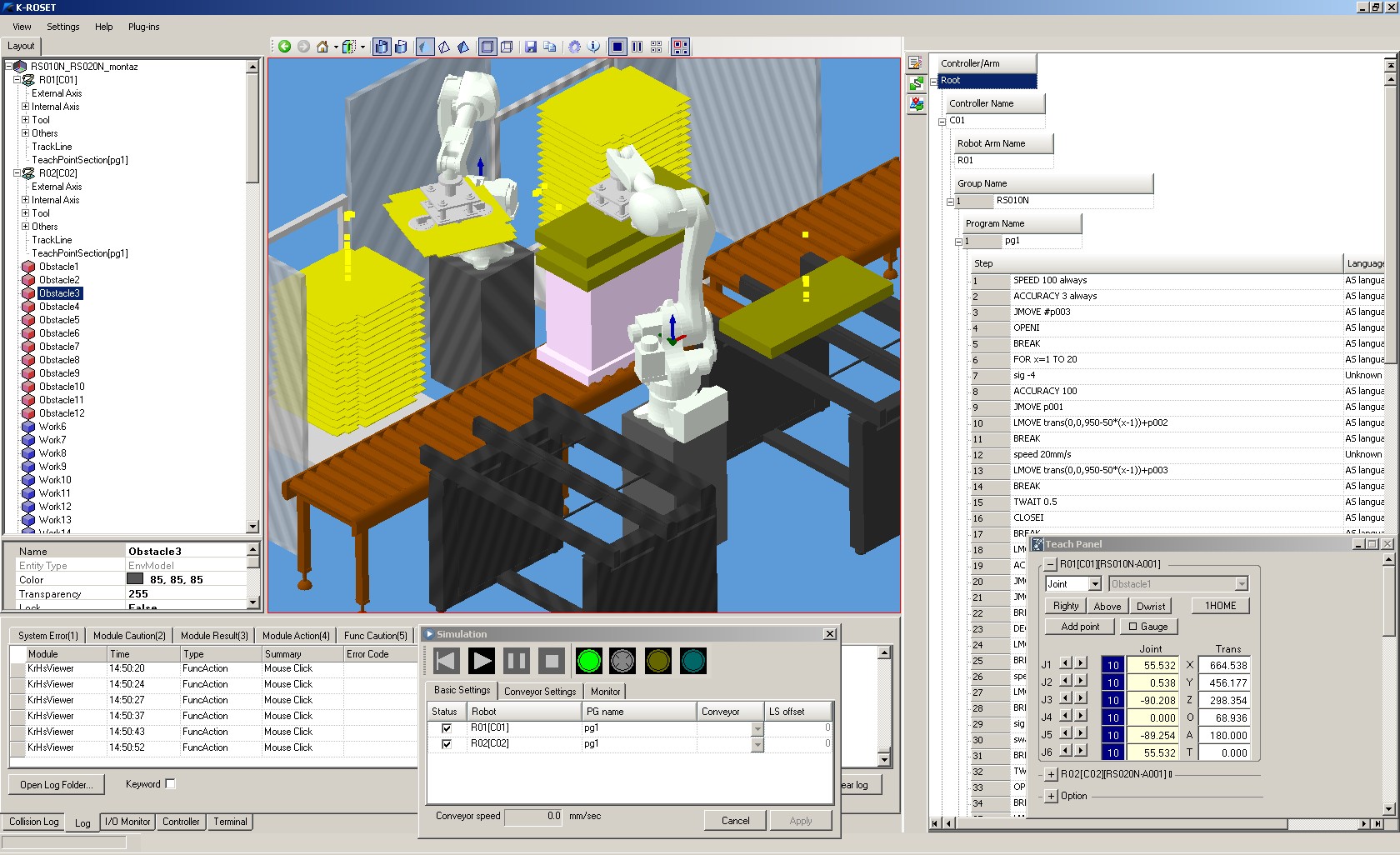
K-Roset to symulator zrobotyzowanych stanowisk pracy z robotami Kawasaki Robotics. W prosty i przejrzysty sposób pozwala na stworzenie symulacji, wykorzystując tory jezdne K-Track i roboty przemysłowe Kawasaki Robotics.
Program umożliwiający zaawansowaną pracę z robotami Kawasaki Robotics i torami jezdnymi K-Track. Pozwala na realizację komunikacji terminalowej, kompleksowe tworzenie oraz modyfikowanie aplikacji. Posiada wbudowany edytor tekstowy, dzięki któremu można w wygodny sposób tworzyć programy.
CS-Configurator to program umożliwiający konfigurację funkcji bezpieczeństwa dostępnych w module Cubic-S dla torów jezdnych do współpracy z robotami Kawasaki Robotics. Moduł ten odpowiada za monitorowanie ruchu toru jezdnego i robota – a w sytuacji, w której zostanie zarejestrowany ruch niedozwolony, stanowisko zostanie zatrzymane awaryjnie.

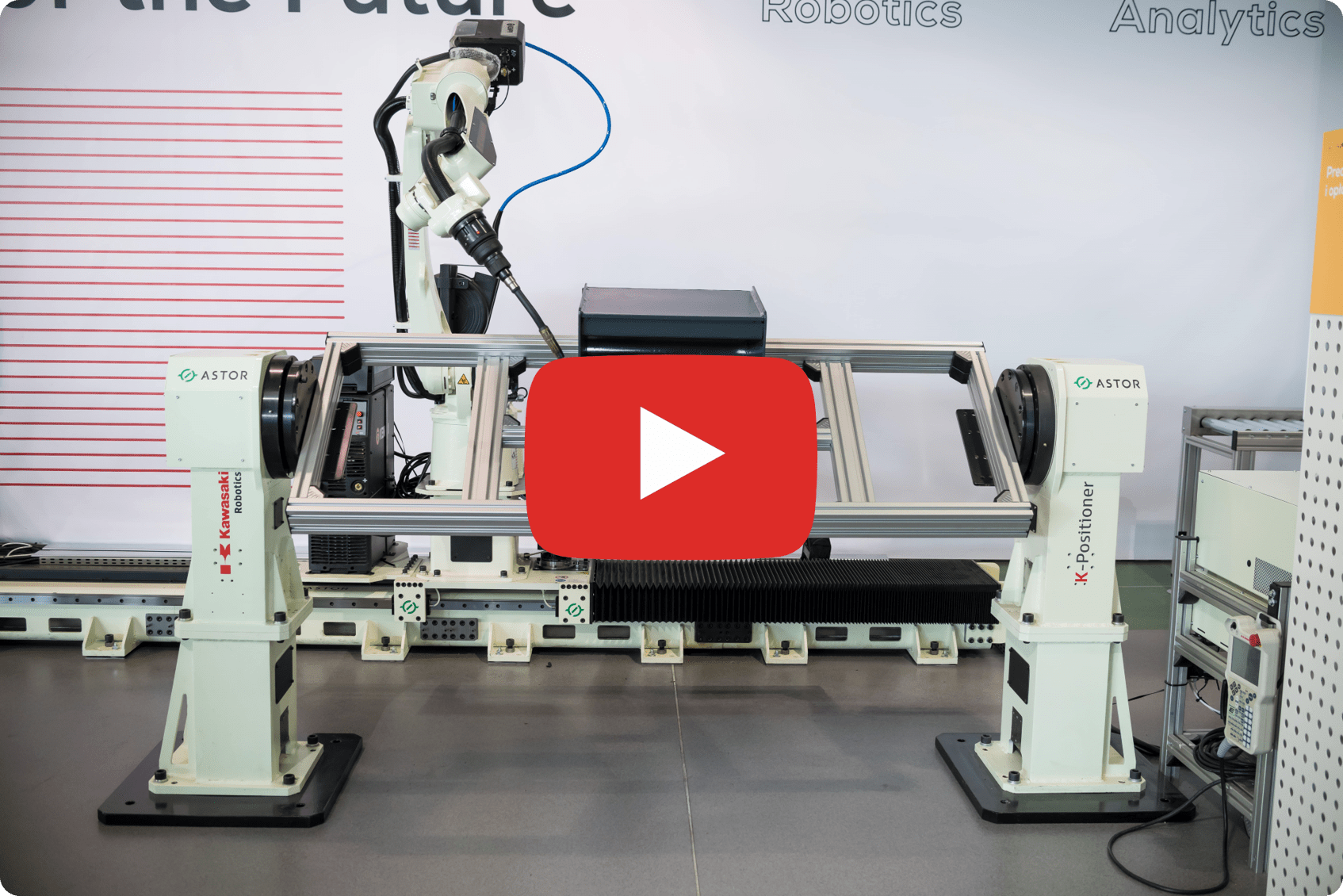
Spawanie zawsze było jednym z głównych zastosowań obrotników i robotów przemysłowych. Zastosowanie obrotnika na stanowisku zrobotyzowanym pozwala zachować powtarzalną jakość produkcji. Sprawia to, że inwestycje w zrobotyzowane spawanie zwracają się szybko.
Czytaj więcej >>
Spawanie zawsze było jednym z głównych zastosowań obrotników i robotów przemysłowych. Zastosowanie obrotnika na stanowisku zrobotyzowanym pozwala zachować powtarzalną jakość produkcji. Sprawia to, że inwestycje w zrobotyzowane spawanie zwracają się szybko.
Czytaj więcej >> |
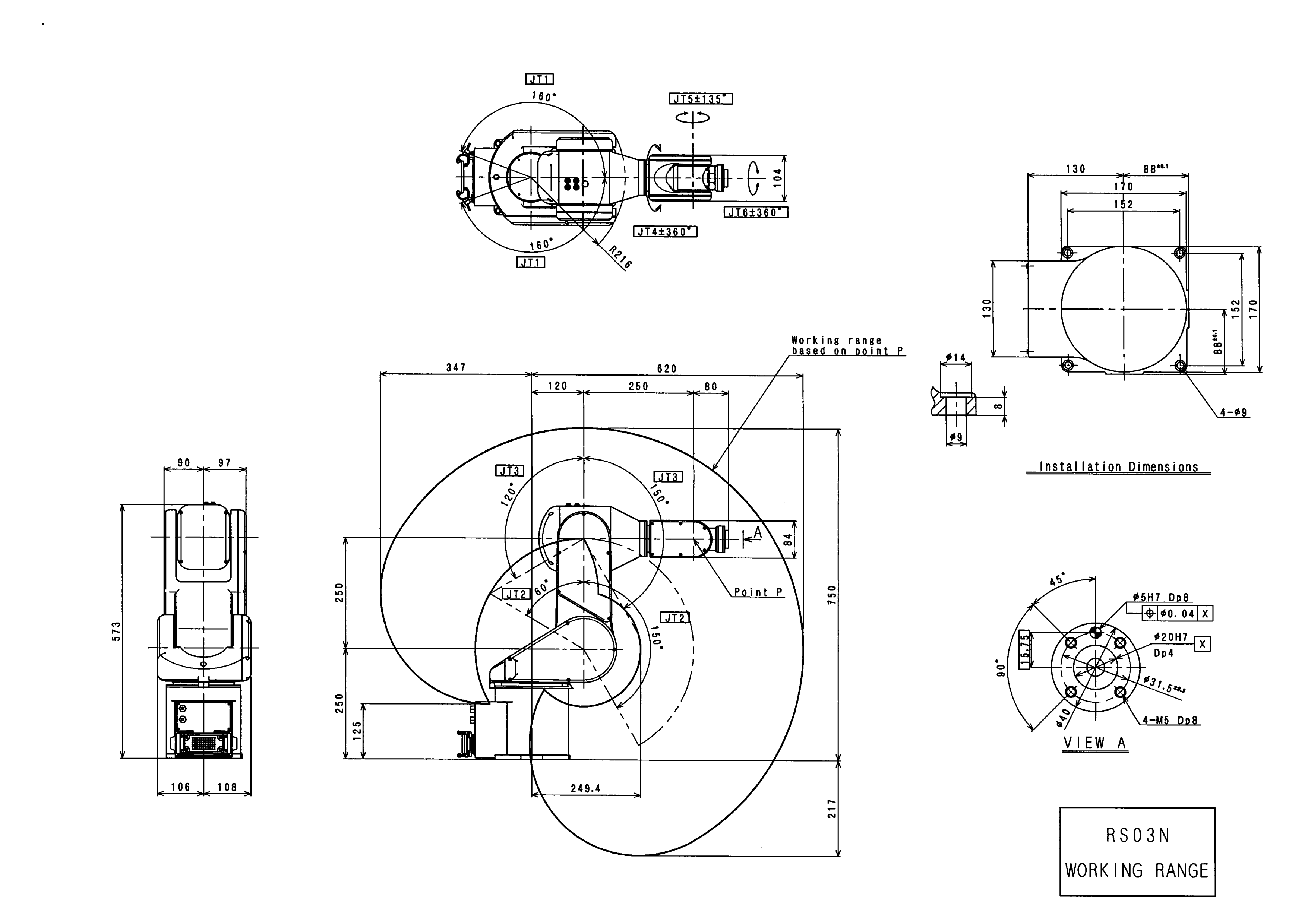
Opis robota:Robot RS003N jest najmniejszy z całej serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze, a nowoczesny projekt ramienia zapewnia przy tym niewielkie gabarytu i małą masę. Niewielkie wymiary, bardzo duża szybkość oraz najwyższa precyzja sprawiają, że robot RS003N świetnie sprawdza się w zastosowaniach gdzie nie potrzeba dużego udźwigu natomiast ważne są niewielkie rozmiary, np: obsługa maszyn, laboratoria, inspekcja z użyciem systemów wizyjnych, edukacja itp. |
Przestrzeń robocza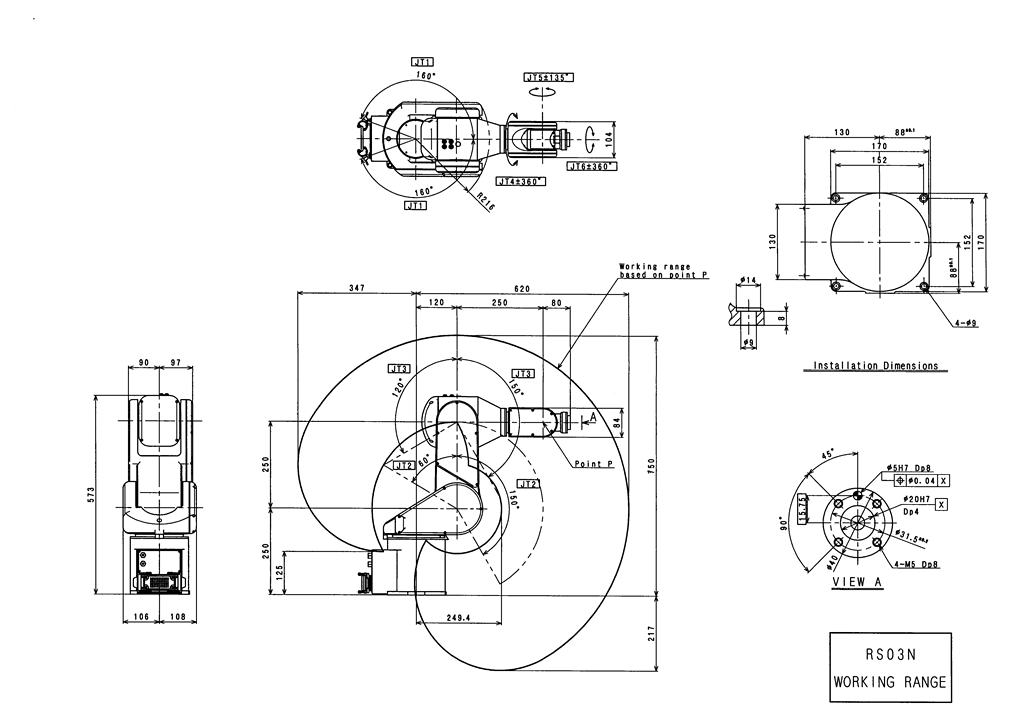 Pobierz obrazek w wysokiej rozdzielczości |
| Udźwig | 500 kg |
| Nominalna prędkość | 1.85 m/s |
| Przyspieszenie | 5 m/s2 |
| Maksymalny udźwig robota | 20 kg |
| Min. zakres posuwu | 1 200 mm |
| Maks. zakres posuwu | 29 200 mm |
| Min. stopniowanie długości posuwu | 1 000mm |
| Powtarzalność pozycjonowania | ±0.05 mm |
| Masa wózka bez opcji | 80 kg |
| Masa wózka wraz z opcjami | 180 kg |
| Podstawowa wysokość montażu robota | 285 mm* |
| Pozycja instalacji | Podłoga, sufit, ściana |
| Warunki pracy | 5-40°C |
*możliwość montażu na postumencie – 613mm
| Udźwig | 800 kg |
| Nominalna prędkość | 1.4 m/s |
| Przyspieszenie | 3,5 m/s2 |
| Maksymalny udźwig robota | 80 kg |
| Min. zakres posuwu | 1 200 mm |
| Maks. zakres posuwu | 29 200 mm |
| Min. stopniowanie długości posuwu | 1 000mm |
| Powtarzalność pozycjonowania | ±0.05 mm |
| Masa wózka bez opcji | 80 kg |
| Masa wózka wraz z opcjami | 180 kg |
| Podstawowa wysokość montażu robota | 285 mm* |
| Pozycja instalacji | Podłoga, sufit, ściana |
| Warunki pracy | 5-40°C |
*możliwość montażu na postumencie – 613mm


Joanna Kowalkowska
Menedżer produktu osprzętu robotyki
tel. 601 525 331
MS Teams/e-mail: joanna.kowalkowska@astor.com.pl
Napisz do nas - odpowiemy w ciągu 24h

 Roboty do szkół
Roboty do szkół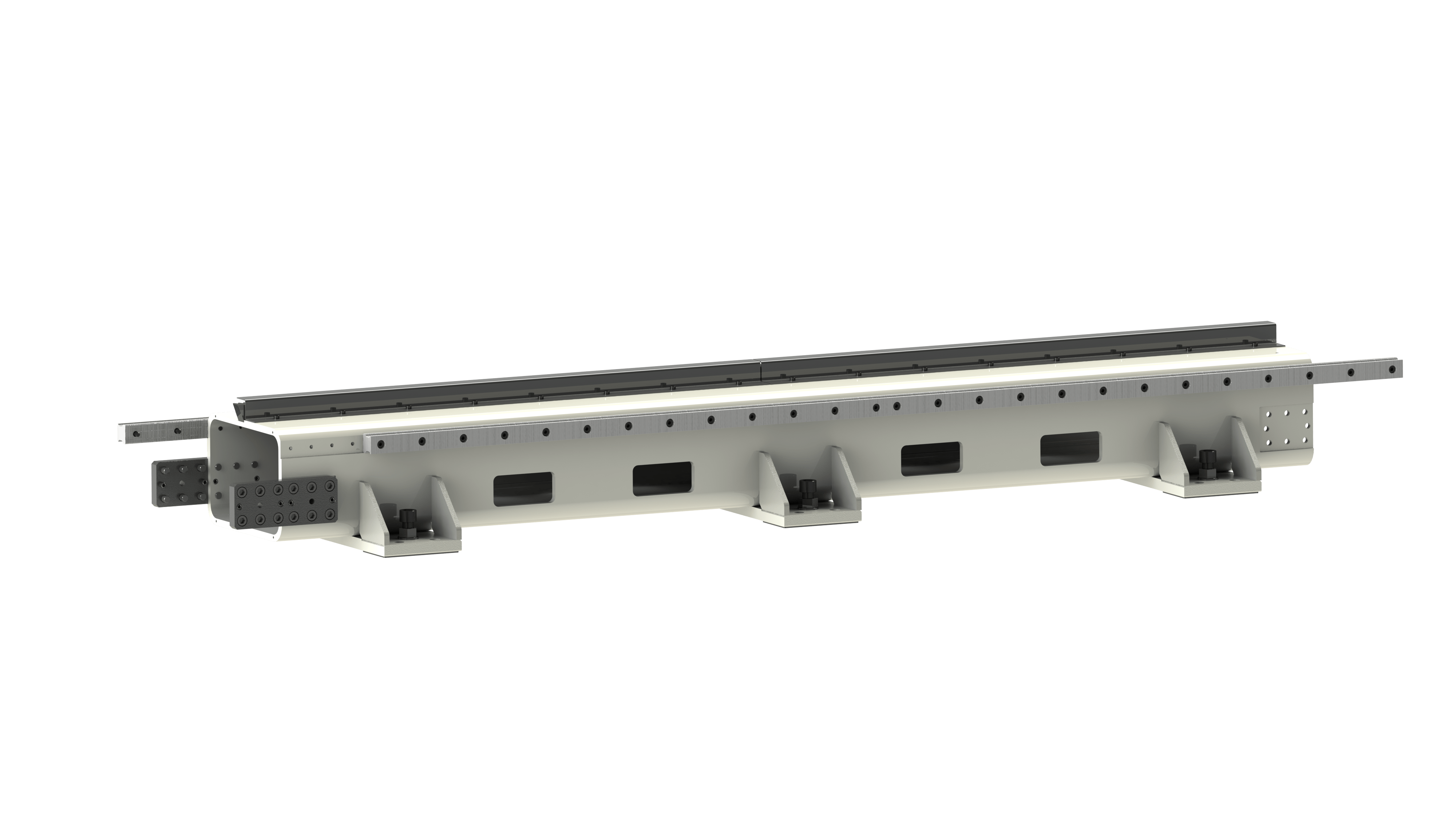
 12 428 63 00
12 428 63 00


{kind=link}