Kurs Ethernet IP w robotach Kawasaki
Kontakt w sprawie artykułu: Mateusz Fas - 2021-04-08

Z tego kursu dowiesz się:
- co to jest protokół Software Ethernet IP,
- gdzie jest wykorzystywany,
- jak samodzielnie skonfigurować połączenie dwóch lub więcej urządzeń na przykładzie robota Kawasaki i różnych sterowników PLC,
- jakie są przykładowe funkcjonalności, możliwości zbierania informacji i ich wizualizacji.
Trudno dziś wyobrazić sobie przemysł bez robotów i sterowników. Urządzenia te stały się nieodłącznym elementem fabryk i zakładów. Są linie produkcyjne, gdzie potrafi pracować ponad tysiąc robotów. Nieoceniona jest wówczas możliwość komunikacji i przesyłania danych między tymi maszynami. Niniejszy kurs poświęcony jest jednemu z najpopularniejszych narzędzi, jakimi dysponuje dzisiejszy przemysł do realizacji tego przedsięwzięcia – protokołowi Software Ethernet IP. Rozwiązanie to stało się wyznacznikiem standardu w swojej branży.
Jeśli jesteś automatykiem/robotykiem/mechatronikiem – nauczymy Cię, jak konfigurować Software Ethernet IP w robotach Kawasaki i sterownikach PLC Astraada i Horner.
Kurs Ethernet IP w robotach Kawasaki
Dodatkowe materiały i lekcje dla kursantów:
Co to jest protokół Software Ethernet IP?
Protokół komunikacyjny Software Ethernet/IP (Software Ethernet Industrial Protocol) jest obecnie jednym z najpopularniejszych narzędzi do skomunikowania ze sobą urządzeń automatyki i robotyki przemysłowej. Pojawił się na rynku w roku 2001, jest stale rozwijany i w tym momencie jest jednym z najbardziej sprawdzonych rozwiązań.
Najważniejsze cechy tego protokołu:
– występuje w dwóch wersjach, jako Scanner (Master) i Adapter (Slave),
– realizowany jest poprzez kabel kategorii 5e lub wyższej ze złączem RJ45,
– umożliwia połączenia wielu urządzeń.
Podstawowe zalety tego połączenia to:
– prostota konfiguracji,
– dobre parametry przesyłania,
– bezpieczeństwo połączenia,
– w większości urządzeń nie ma potrzeby montowania dodatkowych kart sieciowych.
Więcej informacji o samym protokole znajdziesz w artykule pod linkiem Ethernet/IP w robotach Kawasaki.
Gdzie jest wykorzystywany Protokół Software Ethernet IP?
Protokół Software Ethernet IP wykorzystywany jest przede wszystkim w przemyśle, wszędzie tam, gdzie działają urządzenia mechatroniczne i urządzenia automatyki, które komunikują się ze sobą. Są to więc najczęściej linie montażowe, stanowiska zrobotyzowane, systemy sterowania produkcją, kontroli jakości itp.
Przykładowe wykorzystanie połączenia między robotem a sterownikiem PLC:

Jak samodzielnie skonfigurować połączenie Robota Kawasaki i dowolnego sterownika PLC?
Aby połączenie działało poprawnie, należy spełnić szereg wymagań, które narzuca protokół Software Ethernet IP.
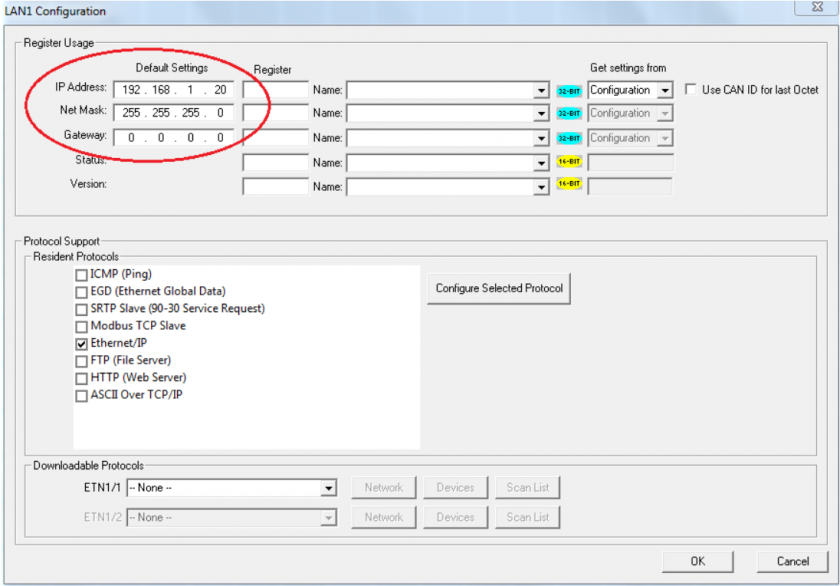
Oprócz samego fizycznego połączenia kablem (RJ45), musisz przeprowadzić konfigurację. Trzeba więc ustalić adresy IP urządzeń i ich maski podsieci.
Adresy IP urządzeń chcących pracować w tej samej podsieci muszą różnić się cyframi za ostatnią kropką.
Przykład:
Urządzenie 1:
Adres IP: 192.168.0.1 maska podsieci: 255.255.255.0
Urządzenie 2:
Adres IP: 192.168.0.50 maska podsieci: 255.255.255.0
Musisz także znać numery instancji danego urządzenia. Numery te są nadawane przez producenta, dostępne są w dokumentacji, nie można ich zmienić samodzielnie, a ustawione nieprawidłowo uniemożliwią działanie protokołu.
Każde urządzenie ma 3 instancje (konfiguracyjną, odbieranych danych i wysyłanych danych).
Poniżej podano numery instancji dla wybranych producentów, których produkty znajdują się w ofercie firmy ASTOR. Ponadto w każdym z artykułów opisujących konfigurację połączenia pokazano również, jak wprowadzić wartości instancji do urządzenia. Wartości instancji:
Kawasaki: 1, 150, 100.
Astraada: 102, 100, 101.
Horner: 1, 100, 101.
Poniżej znajdziesz przewodnik, który krok po kroku opisze jak poradzić sobie z każdym z powyższych wymagań.
Przy niektórych punktach znajdują się linki do dokumentacji technicznej, dostępnej na naszej stronie internetowej. Zachęcamy do zapoznania się z nią.
1. Poprawne podłączenie kabla do urządzenia.
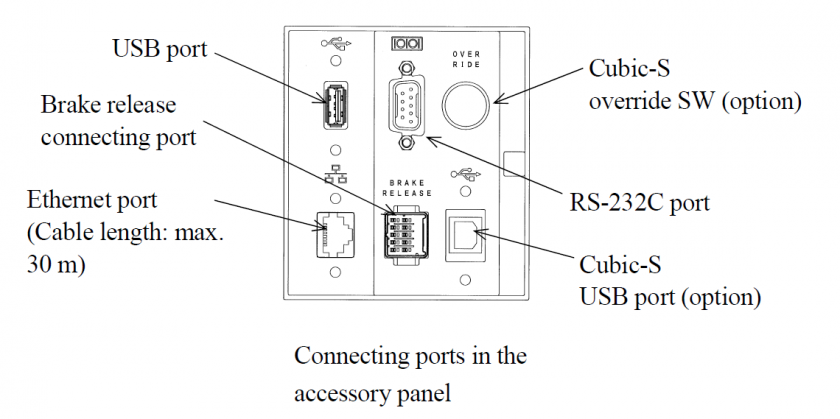
1.1 Roboty Kawasaki.
F – controller: Dokumentacja techniczna | ASTOR
Każdy robot Kawasaki ma 2 porty Ethernet, znajdujące się na kontrolerze. W przypadku kontrolera serii F skorzystaj z drugiego portu, który znajduje się na tylnej obudowie urządzenia.
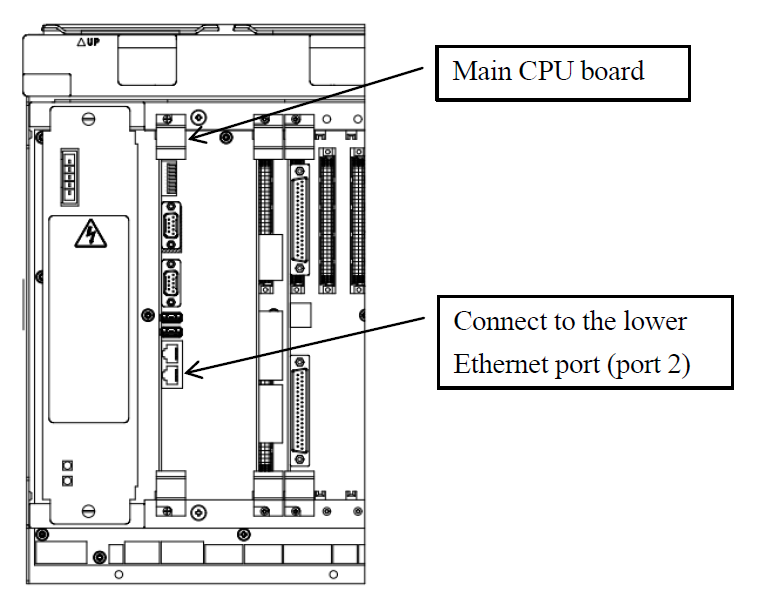
E – controller: Dokumentacja techniczna | ASTOR
W przypadku kontrolera E sprawa jest bardziej skomplikowana, bowiem ten typ kontrolera ma na obudowie tylko jeden port typu Ethernet. Domyślnie jest tam podłączony port 1. Musisz więc wpiąć się na port 2 karty głównej robota. Jeżeli jednak koniecznie chcesz skorzystać z zewnętrznego portu musisz najpierw przepiąć port zewnętrzny do portu 2 karty głównej.
1.2 Sterowniki PLC Astraada.
Astraada One: Dokumentacja techniczna | ASTOR
Każdy sterownik Astraada ONE ma 2 porty Ethernet, które znajdują się z tyłu urządzenia. Jeden z nich służy do połączenia w protokole Software Ethernet IP, drugi zaś do protokołu EtherCAT.
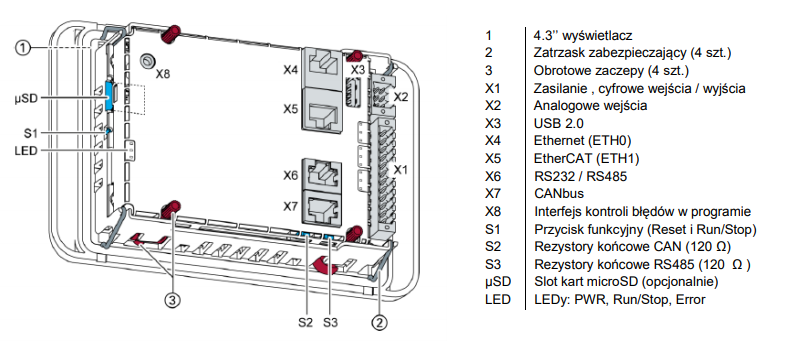
Port ten ma numer X4.
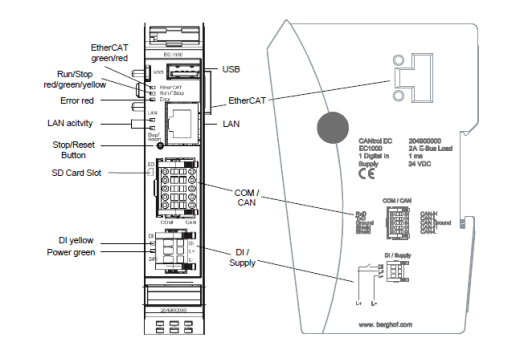
Sterownik PLC Astraada EC2000: Dokumentacja techniczna | ASTOR
Urządzenie ma tylko jeden port, do którego można podłączyć kabel. Tutaj podłączyć należy się do portu LAN.
1.3 Sterowniki PLC Horner. Dokumentacja techniczna | ASTOR
Sterowniki tego producenta posiadają tylko jeden port typu Ethernet, do którego można się podłączyć.
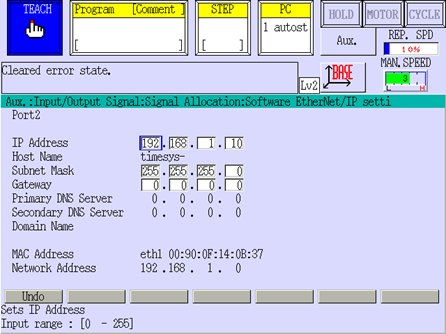
2. Ustawienie adresów IP.
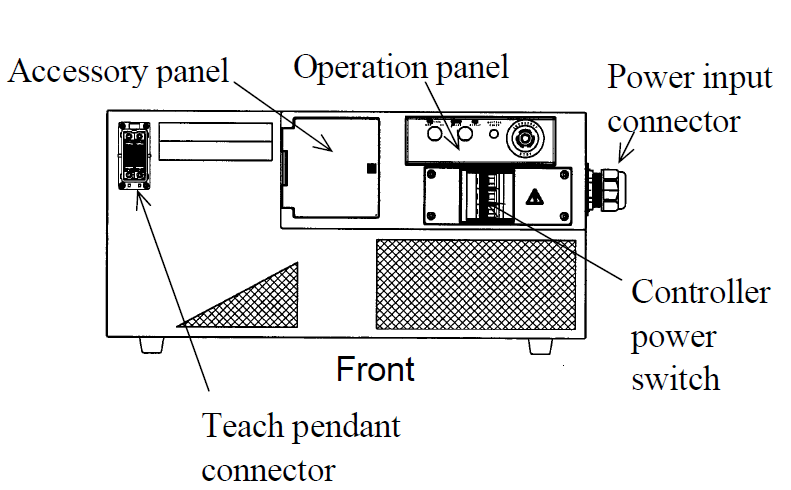
2.1 Ustawienie adresu IP dla robotów Kawasaki
(na urządzeniu Teach Pendant – AUX.0608-9-1).
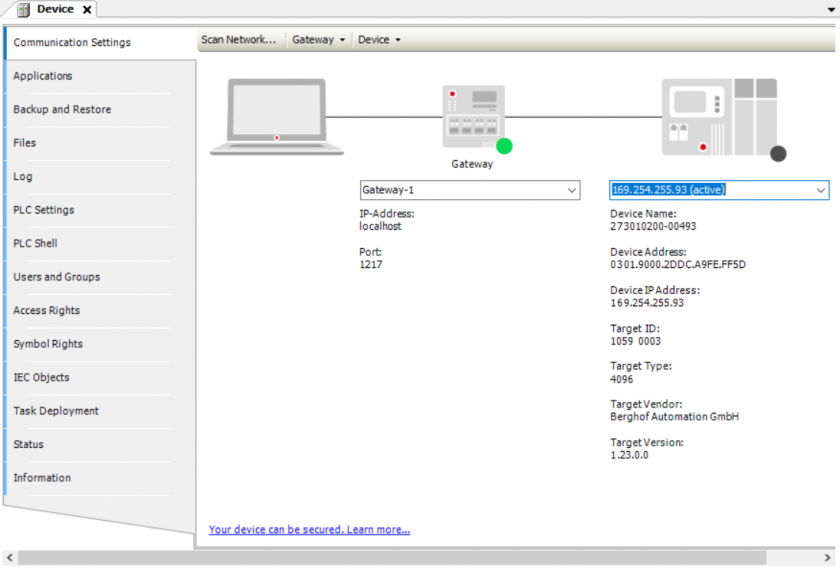
2.2 Ustawienie adresu IP dla sterowników PLC Astraada (oprogramowanie
Codesys – zakładka Device).
2.3 Ustawienie adresu IP dla sterowników PLC Horner APG
(oprogramowanie Cscape) Baza wiedzy | ASTOR
4. Pozostałe ustawienia konfiguracyjne.
Gdy zostaną ustawione adresy IP oraz instancje, możesz zastanowić się nad dalszymi ustawieniami. Określ, ile urządzeń chcemy podłączyć, które z nich będzie adapterem (slave’m), a które scannerem (masterem). Adapterów może być kilka (robot Kawasaki jest w stanie współpracować z maksymalnie 3), natomiast scanner może być tylko jeden.
Jeżeli chcesz wykorzystać Astraadę, to wymagana jest odpowiednia licencja, osobna na adaptera i scannera. Po stronie Kawasaki i Hornera nie musisz martwić się o tę kwestię.
Gdy już ustalisz, które urządzenie jest adapterem, a które scannerem, możesz skorzystać z odpowiedniego artykułu, który krok po kroku opisuje konfigurację.
Poniżej linki do artykułów:
1. Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.1
2. Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.2
3. Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F -skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
4. Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
W temacie Hornera zerknij do dokumentacji technicznej:
Konfiguracja komunikacji pomiędzy robotem Kawasaki (skanerem) a sterownikiem Horner (adapterem) w protokole komunikacyjnym Ethernet IP.
Kolejną ważną kwestią, którą musisz rozpatrzeć, jest wielkość ramki przesyłanych i odbieranych informacji. Aby połączenie mogło działać poprawnie, urządzenie A musi wysyłać tyle samo bitów/bajtów, co odbiera urządzenie B i na odwrót.
Przykład: urządzenie A wysyła 8 bitów i odbiera 16 bitów, więc urządzenie B musi wysyłać 16 bitów i odbierać 8 bitów.
W przypadku większej ilości urządzeń każdą kombinację połączeń trzeba skonfigurować osobno.
Przykład: mamy 3 urządzenia: A,B i C. Musimy skonfigurować połączenia
AB, AC i BC, każde osobno.
Uwaga: zwróć uwagę, czy podajemy wartości w bitach czy w bajtach
(1 bajt = 8 bitów). Jest to najczęściej popełniany błąd przy tym kroku.
Przykładowe funkcjonalności, możliwości zbierania informacji i ich wizualizacji.
W załączonej dokumentacji technicznej znajdziesz m.in. oprogramowanie Codesys.
Codesys: Dokumentacja techniczna | ASTOR
Astraada One: Dokumentacja techniczna | ASTOR
Kursy: Pierwsze kroki w Codesys. Jak stworzyć program? | ASTOR
Pierwsze podłączenie i przygotowanie Codesys do pracy.| ASTOR
Poprzez protokół komunikacyjny można przesyłać bardzo różne informacje.
Poniżej znajdziesz przykład ich przesyłania i wyświetlania na sterowniku Astraada One z panelem HMI połączonym z robotem Kawasaki z kontrolerem serii E. Program napisano w środowisku Codesys.
Niektórym informacjom, np. „silniki włączone, przycisk stop wciśnięty, robot pracuje w cyklu” (Kawasaki – funkcja Dedicated Output Signals) wystarczy jeden bit do przesłania danych. Wówczas wartość 0 oznacza fałsz, a wartość 1 – prawdę. Są jednak informacje wymagające do przesłania większej ilości bitów, np. liczba w systemie dziesiętnym w zakresie od 0 do 32 000 (Kawasaki funkcja bits) może działać maksymalnie dla 16 bitów, a więc 2 bajtów. Są też urządzenia zewnętrzne podłączane do robota lub sterownika, np. dalmierz laserowy, które potrzebują nawet kilku tysięcy bitów do przesłania informacji. Jest to więc duża rozbieżność jeśli chodzi o rozmiar informacji.
Napisz więc prosty program, który będzie wyświetlał nam na panelu HMI informację, czy przycisk STOP w robocie jest włączony.
Program będzie docelowo wyglądał tak:

Wszystkie poniżej prezentowane kroki opisane zostały w dokumentacji do Codesysa i artykułach o konfiguracji protokołu Ethernet IP.
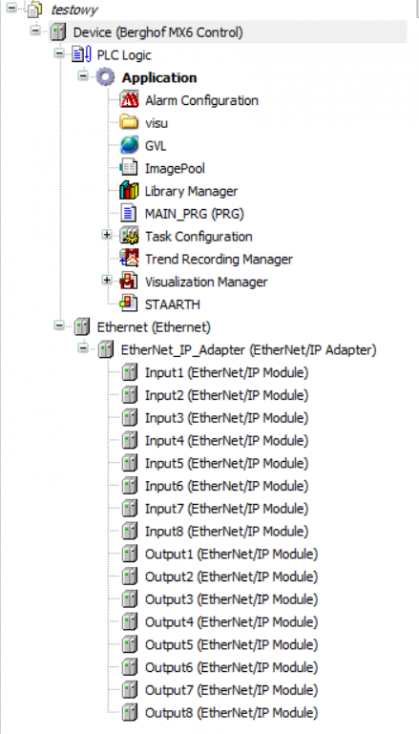
Po utworzeniu nowego programu w Codesysie ustaw nazwę programu, dodaj urządzenie Device i skonfiguruj tam adres IP swojego sterownika. Potem skonfiguruj wymianę danych. W tej przykładowej aplikacji będzie to 8 bitów wysyłanych i 8 bitów odbieranych. Robot Kawasaki będzie scannerem, a Astraada adapterem.
Kod głównego programu będzie prezentował się następująco:
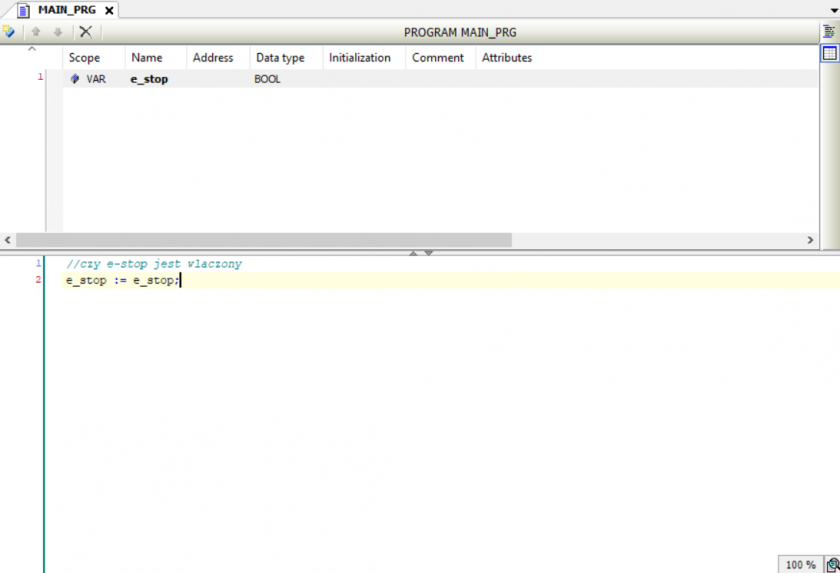
W oknie programu przypisaliśmy również zmienną typu BOOL, jako e_stop.
Teraz tę zmienną przypisz do komunikacji w Codesysie na odpowiedni bit odbierany i jednocześnie w robocie na odpowiedni bit wysyłany. Użyjemy do tego wyżej wspomnianej funkcji Dedicated Output Signals w robocie Kawasaki.
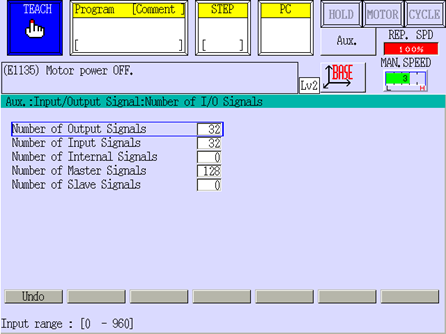
Przypisz odpowiednią liczbę sygnałów, możesz przypisać ich więcej i nie wykorzystać ich, natomiast nie możesz przypisać mniej niż wykorzystasz. (AUX.0611)
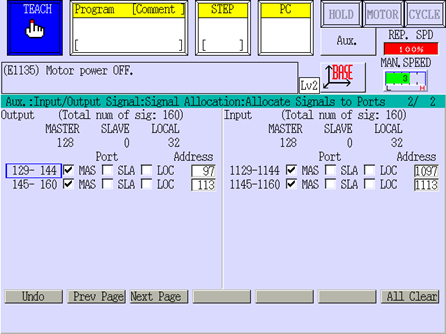
Następnie przypisz sygnały. (AUX.0608-1)
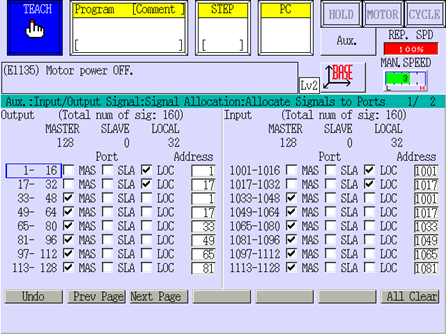
Po przypisaniu sygnałów w ten sposób pierwsze 32 sygnały są sygnałami fizycznymi. Przypisz więc sygnał 35 jako działanie e-stopu.
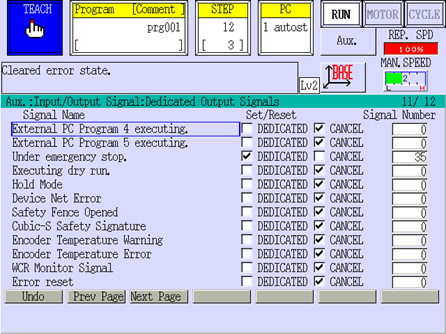
W Dedicated Output Signals zaznaczamy opcję Under emergency stop. jako dedicated i przypisujemy numer 35.
(AUX.0602-11)
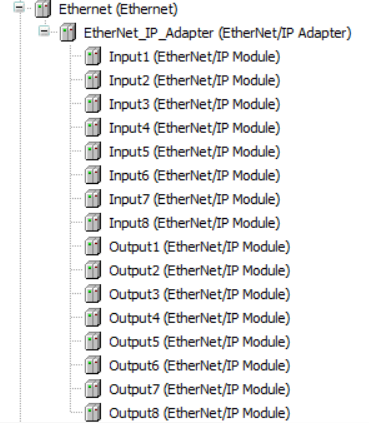
Teraz została do ustalenia komunikacja po stronie Astraady.
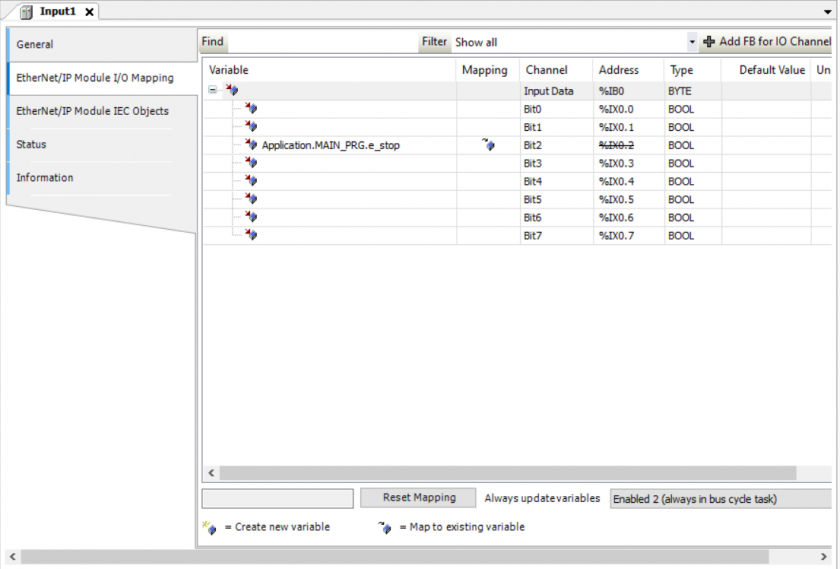
Kliknij więc: Input1 – EtherNet/IP Module I/O Mapping – następnie rozwiń + okno i przypisz to do 3 bitu. Ponieważ pierwsze 32 sygnały na robocie są fizyczne, to 35 sygnał na robocie jest 3 komunikacyjnym i również 3 odbieranym przez sterownik. Dlatego przypisujesz to w tym miejscu: Input1 to pierwsze 8 bitów.
Przypisz tam zmienną z naszego programu głównego: Application.MAIN_PRG.e_stop.
Pozostało przypisanie na ekranie wizualizacji elementu typu lamp do zmiennej.
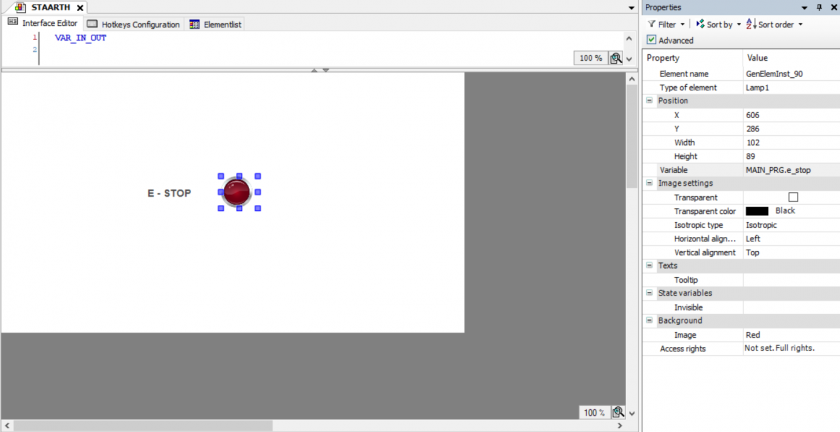
Przypisz to w zakładce Properties – Variable.
Całość programu powinna prezentować się następująco:
Następnie kliknij Build (F11), zapisujesz i wgrywasz do sterownika.
W naszej aplikacji robot Kawasaki jest scannerem.
Teraz musisz ustawić pozostałą część komunikacji po stronie robota, tak jak w odcinku: