Konfiguracja więcej niż jednego urządzenia typu adapter w komunikacji z robotem Kawasaki – skanerem – w protokole Ethernet/IP – odc.7
Kontakt w sprawie artykułu: Tomasz Fuchs - 2021-05-28
Z tego artykułu dowiesz się:
- jak skonfigurować robota Kawasaki jako Scanner,
- jak skonfigurować sterowniki PLC Horner, Astraada ONE jako Adaptery,
- jak sprawdzić poprawność działania komunikacji połączenia.
Witaj w kolejnym odcinku z kursu Ethernet IP w robotach Kawasaki. W poprzednim odcinku dowiedziałeś się jak skonfigurować komunikację pomiędzy robotem Kawasaki – skanerem – a sterownikiem Horner – adapterem. W tym odcinku dowiesz się jak skonfigurować komunikację więcej niż jednego urządzenia typu adapter w komunikacji z robotem Kawasaki – skanerem.
Kurs Ethernet IP w robotach Kawasaki
Dodatkowe materiały i lekcje dla kursantów:
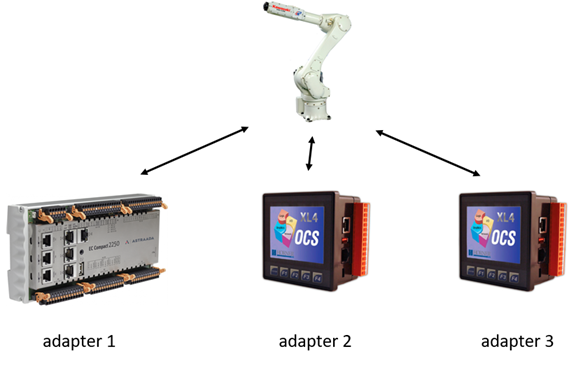
W odcinku znajdziesz informacje dotyczące sposobu konfiguracji robota kawasaki w protokole Ethernet IP w przypadku komunikacji z więcej niż 1-dnym adapterem (robot, będąc skanerem, może komunikować się z maksymalnie 3-ma adapterami w tym protokole).
W zależności od wybranego adaptera najpierw zapoznaj się z treścią odpowiadającego danemu urządzeniu artykułu oraz skonfiguruj komunikację z 1-dnym urządzeniem, a w następnej kolejności przejdź do uzupełnienia komunikacji o 2-gie i potem 3-cie urządzenie.
Na potrzeby niniejszego odcinka kursu, została skonfigurowana komunikacja w protokole Ethernet IP taka, jak na poniższym schemacie:
Konfigurację robota możesz przeprowadzić z wykorzystaniem teach pendant’a. W przypadku braku możliwości korzystania z któregoś menu konfiguracyjnego po stronie robota lub sterownika, skontaktuj się z działem pomocy technicznej firmy ASTOR.
Jeżeli chcesz skonfigurować komunikację w analogiczny sposób jak w przykładzie z artykułu – czyli z adapterami różnych producentów (np. Horner / Astraada ONE), to zalecamy przeprowadzić najpierw konfigurację komunikacji z każdym z urządzeń osobno, zweryfikować jej działanie i dopiero wtedy przejść do konfiguracji ich wspólnej komunikacji.
Jeżeli testy komunikacji z każdym urządzeniem osobno przeprowadzisz pomyślnie, możesz przejść do właściwego tematu, któremu poświęcony jest odcinek, czyli dodania 2-giego i 3-ciego adaptera do komunikacji z robotem.
1. Konfiguracja robota
1.1 Fizycznie połącz porty ethernet’owe urządzeń z wykorzystaniem kabla RJ45 kategorii 5e lub wyższej (shielded cable) – urządzenia powinny być wyłączone.
W przypadku robota do komunikacji w protokole Ethernet/IP wykorzystujesz port 2 (dolny) na kontrolerze. Jeżeli kontroler jest w orientacji poziomej – np. kontroler E0x/E7x, to 2gi port ethernetowy znajduje się po prawej stronie. Ważne jest, aby przy fizycznym podłączaniu kabla urządzenia były wyłączone. W przypadku komunikacji z więcej niż 1-dnym adapterem, wykorzystaj switch do połączenia wszystkich urządzeń.
1.2 Włącz kontroler robota.
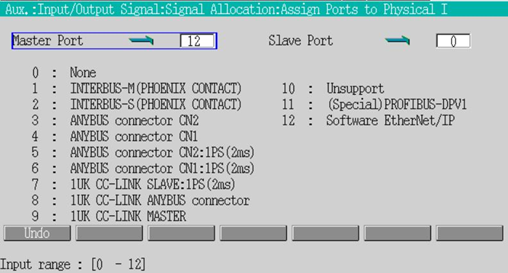
1.3 Przypisz do portu master software’owy protokołu Ethernet IP (AUX.0608-2).
1.4 Przypisz adres IP do wykorzystywanego portu ethernetowego. (AUX.0608-9-1)
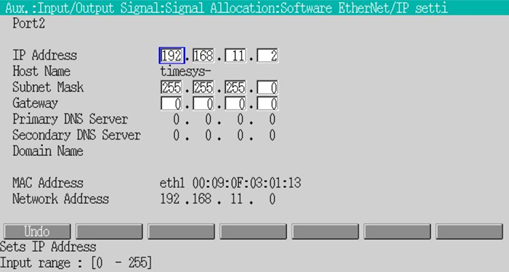
Tutaj zwróć uwagę na to, że zarówno robot, jak i wszystkie urządzenia komunikujące się z robotem w omawianym protokole muszą posiadać IP w tej samej podsieci – zgodnej z maską podsieci (tzn. przykładowo, w przypadku wykorzystywanej maski podsieci:
255.255.255.0, ip urządzeń mogą się różnić tylko liczbami za trzecią kropką – np. 192.168.11.2, 192.168.11.5, 192.168.11.10, 192.168.11.77).
Maska podsieci powinna być ustawiona na robocie tak samo jak na wszystkich adapterach.
1.5 Zrestartuj kontroler robota.
1.6 Ustaw odpowiednią liczbę sygnałów master. (AUX.0611)
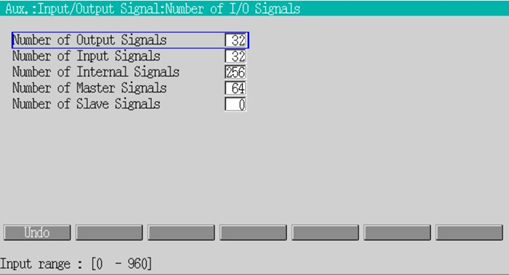
W powyższym przykładzie zostały ustawione 64 sygnały master. Ważne jest aby ustawiona liczba sygnałów była co najmniej taka jak liczba sygnałów wykorzystywana w komunikacji ze wszystkimi urządzeniami.
1.7 Przypisz sygnały (porty) master do odpowiednich sygnałów wejściowych/wyjściowych robota. (AUX.0608-1)
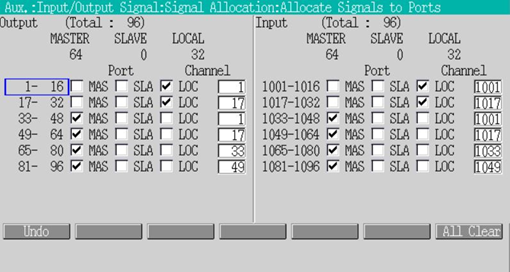
Jak widzisz na zamieszczonym przykładzie, oprócz zaznaczenia (przypisania) sygnałom portu master, musisz także w polach „Channel” wpisać numery 1-szych sygnałów – widocznych po lewej (odpowiednio dla sygnałów 1 – 16 ustawiasz channel 1, dla sygnałów 17 – 32 channel 17, etc.).
W tym przypadku maksymalna liczba sygnałów, które możesz przypisywać do portów wynosi 64, jednak gdybyś ustawił z wykorzystaniem funkcji AUX0611 więcej sygnałów to tutaj też byłoby ich więcej. Maksymalnie możesz wykorzystać 960 sygnałów. Pierwsze 32 sygnały są ustawione jako lokalne – są to fizyczne wejścia i wyjścia robota.
Najczęściej występujące problemy przy konfigurowaniu tego okna występują w przypadku próby przypisania portów master/slave/local do większej liczby sygnałów niż ustawionej przy użyciu funkcji AUX0611. Oprócz tego zwróć uwagę na to, aby odpowiadające sobie sygnały wejściowe (input) oraz wyjściowe (output) były przypisane do tego samego portu. Zatwierdzenie ustawień może być także niemożliwe, jeżeli przy alokacji sygnałów nie będziesz korzystać z części sygnałów znajdujących się pomiędzy obszarami wykorzystywanych sygnałów (co odpowiada pozostawieniu pola channel równego 0). Np. nie możesz korzystać z sygnałów 1 – 32 oraz 49 – 80 nie korzystając jednocześnie z sygnałów 33 – 48. Możesz natomiast korzystać np. z sygnałów 1 – 48 nie korzystając jednocześnie z sygnałów 49 – 80.
1.8 Zrestartuj kontroler robota.
1.9 Ustaw kolejności sygnałów dla portów master. ( AUX.0608-3)
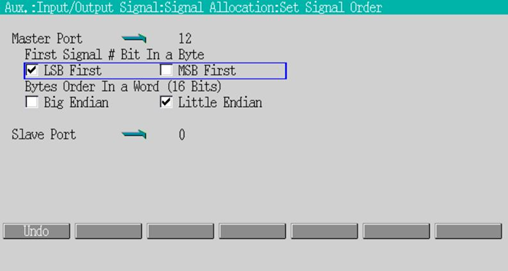
Ustawienie to nie ma wpływu na to czy komunikacja będzie działała czy też nie. Ustawienie domyślne, czyli pokazane na powyższym przykładzie oznacza, że pierwszy sygnał (bit), który się zmieni w bajcie to najmniej znaczący bit (LSB) oraz pierwszy bajt, który się zmieni w słowie (1 słowo = 2 bajty) to mniej znaczący bajt. Jeżeli nie jest wymagana żadna konkretna konfiguracja kolejności zmiany bitów/bajtów to zalecane jest pozostawienie tutaj ustawienia domyślnego.
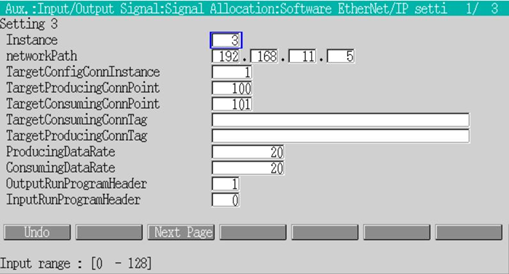
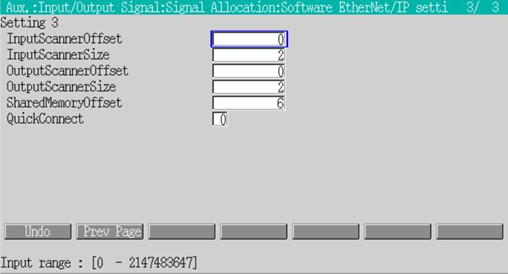
1.10 Ustaw informację o 1-szym adapterze oraz o liczbie wysyłanych / odbieranych bitów (sygnałów) podczas komunikacji z tym adapterem (AUX.0608-9-4-1).
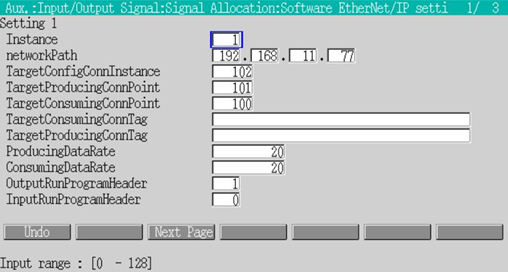
Kluczowymi ustawieniami w tym menu są: adres IP urządzenia z którym następuje połączenie, w tym przypadku ze sterownikiem PLC Astraada ONE oraz TargetConfigConnPoint / TargetProducingConnPoint / TargetConsumingConnPoint, jak również Output/Input Run program Header które powinieneś ustawić tak, jak w zamieszczonym na poprzedniej stronie przykładzie.
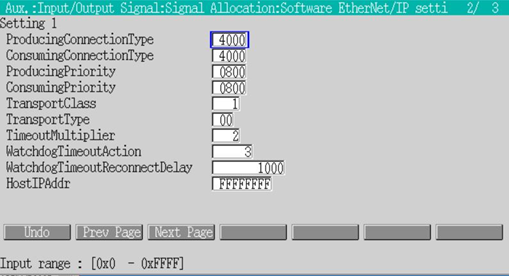
W tym oknie zaleca się pozostawienie ustawień domyślnych o ile przed komunikacją nie zostały postawione żadne niestandardowe wymagania.
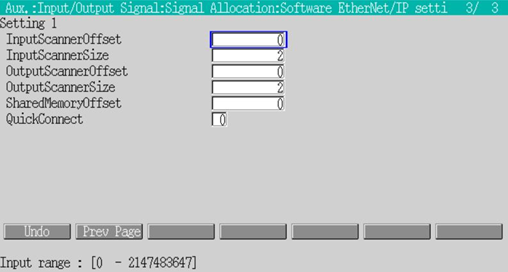
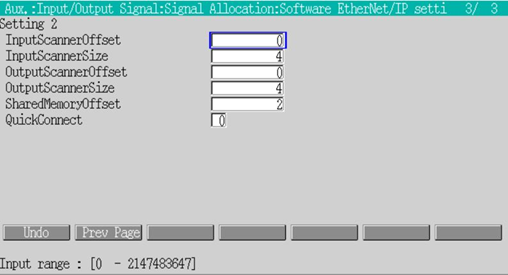
Ustawienie odpowiedniej wielkości wejścia/wyjścia skanera jest niezbędne aby komunikacja pomiędzy urządzeniami mogła w ogóle zaistnieć. W omawianym przykładzie zakładasz wymianę 2 bajtów danych pomiędzy robotem Kawasaki oraz sterownikiem Astraada ONE, z dodatkowym założeniem, że ramka wymieniana ze sterownikiem będzie się rozpoczynała począwszy od 1-szego sygnału w omawianym protokole – z zerowym offsetem. Skonfigurowanie robota analogicznie jak na powyższym przykładzie, spowoduje, że po wystawieniu na sterowniku 1-szego wyjścia w komunikacji, na robocie zostanie ustawiony w stan wysoki sygnał wejściowy nr 33, czyli 1-szy sygnał w komunikacji w protokole Ethernet IP – zgodnie z ustawieniem z podpunktu 2.7.
1.11 Ustaw informację o 2-gim adapterze oraz o liczbie wysyłanych / odbieranych bitów (sygnałów) podczas komunikacji z tym adapterem. (AUX.0608-9-4-2)
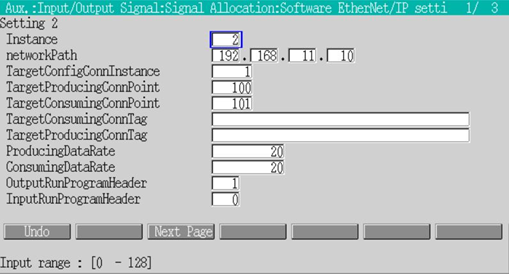
Powyższe ustawienia są analogiczne jak dla 1-szego adaptera, z tą różnicą, że odpowiadają sterownikowi PLC firmy Horner – czyli ustawiasz IP sterownika Horner oraz parametry TargetConfigConnPoint / TargetProducingConnPoint / TargetConsumingConnPoint odpowiednie dla tego urządzenia.
Zwróć też uwagę, że w polu „Instance” wpisałeś 2 – to ustawienie mówi o tym, że konfigurujesz 2-gi adapter w komunikacji.
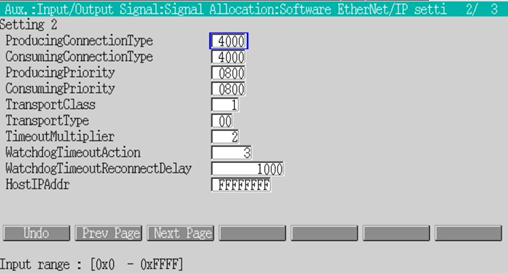
W tym oknie zaleca się pozostawienie ustawień domyślnych o ile przed komunikacją nie zostały postawione żadne niestandardowe wymagania.
W omawianym przykładzie zakładasz wymianę 4 bajtów danych pomiędzy robotem Kawasaki oraz sterownikiem Hornera, z dodatkowym założeniem, że ramka wymieniana ze sterownikiem będzie się rozpoczynała począwszy od 17-tego sygnału w omawianym protokole – z offsetem równym 2 bajtom. Skonfigurowanie robota analogicznie jak na powyższym przykładzie, spowoduje, że po wystawieniu na sterowniku 1-szego wyjścia w komunikacji, na robocie zostanie ustawiony w stan wysoki sygnał wejściowy nr 49, czyli 17-ty sygnał w komunikacji w protokole Ethernet IP – zgodnie z ustawieniem z podpunktu 2.7.
1.12 Ustaw informację o 3-cim adapterze (sterowniku) oraz o liczbie wysyłanych / odbieranych bitów (sygnałów) podczas komunikacji z tym adapterem. (AUX.0608-9-4-3)
Powyższe ustawienia są analogiczne jak dla 2-giego adaptera z tą różnicą, że ustawiłeś IP 3-ciego sterownika Horner.
Zwróć też uwagę, że w polu „Instance” wpisałeś 3 – to ustawienie mówi o tym, że konfigurujesz 3-ci adapter w komunikacji.
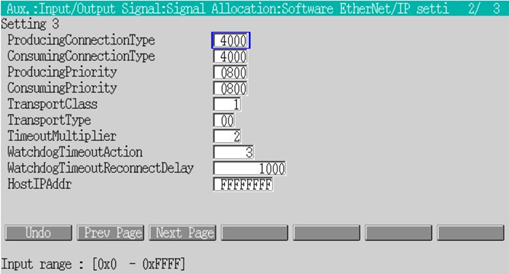
W tym oknie zaleca się pozostawienie ustawień domyślnych o ile przed komunikacją nie zostały postawione żadne niestandardowe wymagania.
W omawianym przykładzie zakładasz wymianę 2 bajtów danych pomiędzy robotem Kawasaki oraz 2-gim sterownikiem Hornera, z dodatkowym założeniem, że ramka wymieniana ze sterownikiem będzie się rozpoczynała począwszy od 49-tego sygnału w omawianym protokole – z offsetem równym 6-ciu bajtom. Skonfigurowanie robota analogicznie jak na powyższym przykładzie, spowoduje, że po wystawieniu na sterowniku 1-szego wyjścia w komunikacji na robocie zostanie ustawiony w stan wysoki sygnał wejściowy nr 81, czyli 49-ty sygnał w komunikacji w protokole Ethernet IP – zgodnie z ustawieniem z podpunktu 2.7.
1.13 Zrestartuj kontroler robota.
2. Zweryfikuj poprawność działania komunikacji.
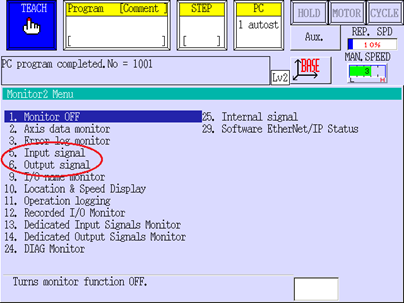
2.1. Włącz monitor protokołu Ethernet IP przy użyciu teach pendant’a.
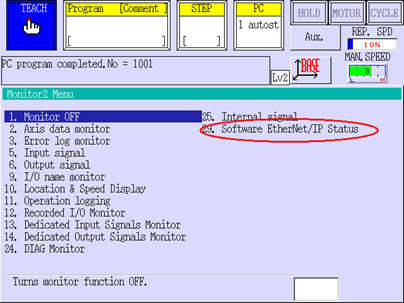
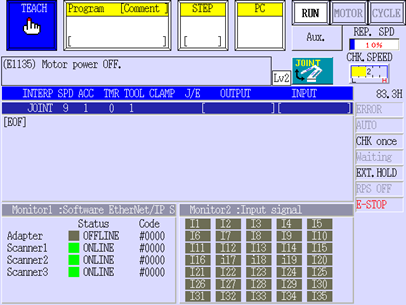
Jak widzisz indykatory przy napisach „Scanner1”, „Scanner2”, „Scanner3” informują, że zostało poprawnie nawiązane połączenie ze wszystkimi 3-ma sterownikami. W przypadku jeśli nie pojawiłby się napis „online” przy którymś ze skanerów upewnij się, czy liczba sygnałów wysyłanych oraz odbieranych zarówno przez robota jak i sterowniki zgadza się ze sobą (weryfikując omówione wcześniej ustawienia robota i sterowników). Ponadto warto sprawdzić czy nie ma problemu z fizycznym połączeniem czy też z ustawionymi adresami IP urządzeń. Najłatwiej sprawdzić to poprzez wykorzystanie funkcji ping. Jeżeli natomiast wszystko jest w porządku, możesz przejść do przetestowania poprawności parametrów komunikacji.
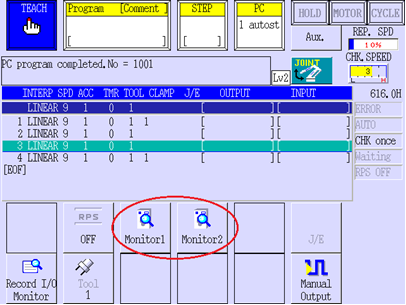
2.2. Włącz monitory sygnałów wejściowych/wyjściowych i spróbuj komunikacji ze sterownikami.
Uruchomienia monitorów sygnałów dokonujesz poprzez fizyczne naciśnięcie dolnej części ekranu teach pendant’a (tak aby górna wstążka podświetliła się na niebiesko), a następnie wybierasz odpowiednie pozycje dla monitora 1-szego i 2-giego.
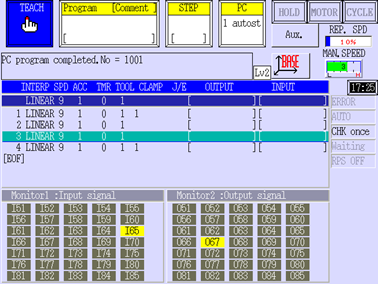
Odpowiednie sygnały wejściowe na monitorze podświetlą się po wystawieniu sygnałów wyjściowych na sterowniku, natomiast sygnały wyjściowe robota są ustawiane z wykorzystaniem teach pendant’a. Dokonujesz tego poprzez najechanie strzałkami na dany sygnał, a następnie wciśnięciu kombinacji przycisków Alt (A) + ON (1).
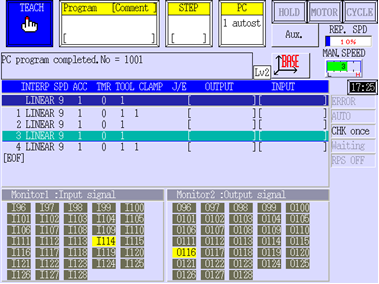
Chcąc ustawić ze sterownika konkretne sygnały wejściowe na robocie zmień wartości rejestrów (słów) na sterowniku tak, aby ich interpretacje binarne odpowiadały pożądanym sygnałom. Przykładowo jeżeli wartość słowa zostanie ustawiona na sterowniku na 10 to interpretacja binarna będzie następująca:
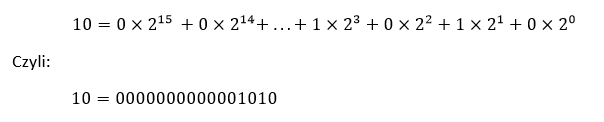
W efekcie zostaną wystawione 2 i 4 bit w słowie, czyli także na robocie.
To już ostatni odcinek z cyklu Ethernet IP w robotach Kawasaki.