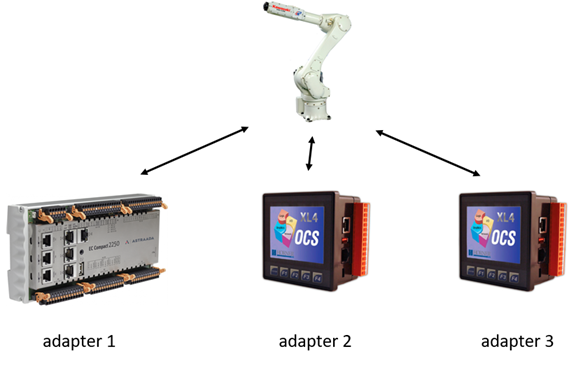
Bez kategorii Konfiguracja więcej niż jednego urządzenia typu adapter w komunikacji z robotem Kawasaki – skanerem – w protokole Ethernet/IP – odc.7 Tomasz Fuchs 2021-05-28
Bez kategorii Konfiguracja komunikacji pomiędzy robotem Kawasaki – skanerem – a sterownikiem Horner – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.6 Tomasz Fuchs 2021-05-21
Bez kategorii Konfiguracja komunikacji pomiędzy robotami Kawasaki w protokole komunikacyjnym Software Ethernet IP – odc.5 Tomasz Fuchs 2021-05-10
 Tomasz Fuchs 2021-05-28
Tomasz Fuchs 2021-05-28 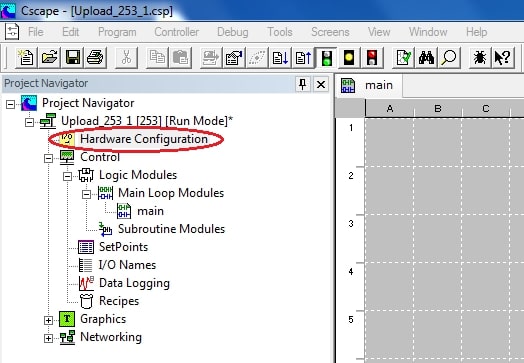 Tomasz Fuchs 2021-05-21
Tomasz Fuchs 2021-05-21  Tomasz Fuchs 2021-05-10
Tomasz Fuchs 2021-05-10