Konfiguracja komunikacji pomiędzy robotami Kawasaki w protokole komunikacyjnym Software Ethernet IP – odc.5
Kontakt w sprawie artykułu: Tomasz Fuchs - 2021-05-10

Z tego artykułu dowiesz się:
- jak skonfigurować roboty Kawasaki – w tym jeden jako scanner, a drugi jako adapter,
- jak sprawdzić poprawność działania komunikacji pomiędzy tymi robotami.
Witaj w kolejnym odcinku z kursu Ethernet IP w robotach Kawasaki. W poprzednim odcinku dowiedziałeś się jak skonfigurować komunikację pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem. W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy dwoma robotami Kawasaki.
Kurs Ethernet IP w robotach Kawasaki
Dodatkowe materiały i lekcje dla kursantów:
1. Konfiguracja robotów jako adapter oraz scanner.
1.1 Konfiguracja robota nr 1 (adapter)
1. Fizycznie połącz porty ethernetowe robotów z wykorzystaniem kabla RJ45 kategorii 5e lub wyższej (shielded cable) – przy wyłączonych kontrolerach.
2. Włącz kontrolera robota Kawasaki nr 1.
3. Przypisz do portu slave software’owego protokołu Ethernet/IP (AUX.0608-2).
4. Przypisz adres IP do wykorzystywanego portu ethernetowego (AUX.0608-9-1).
5. Zrestartuj kontroler robota Kawasaki nr 1.
6. Ustaw odpowiednią liczbę sygnałów slave (AUX.0611).
7. Przypisz sygnały (portów) slave do odpowiednich sygnałów wejściowych/wyjściowych robota (AUX.0608-1).
8. Zrestartuj kontroler robota Kawasaki nr 1.
9. Ustaw kolejność sygnałów dla portu slave (AUX.0608-3).
10. Ustaw informacje o liczbie wysyłanych / odbieranych bitów (sygnałów) podczas komunikacji (AUX.0608-9-4-3).
11. Wyłącz kontroler robota Kawasaki nr 1.
1.2 Konfiguracja robota nr 2 (scanner)
1. Fizycznie połącz porty ethernetowe robotów z wykorzystaniem kabla RJ45 kategorii 5e lub wyższej (shielded cable) – przy wyłączonych kontrolerach.
2. Włącz kontroler robota Kawasaki nr 2.
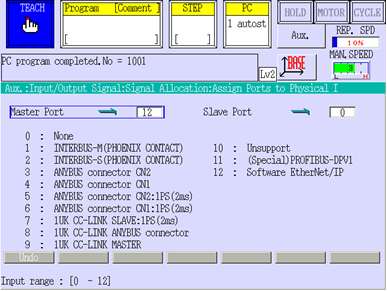
3. Przypisz do portu master software’owego protokołu Ethernet/IP (AUX.0608-2).
4. Przypisz adres IP do wykorzystywanego portu ethernetowego (AUX.0608-9-1).
5. Zrestartuj kontroler robota Kawasaki nr 2.
6. Ustaw odpowiednią liczbą sygnałów master (AUX.0611).
7. Przypisz sygnały (portów) master do odpowiednich sygnałów wejściowych/wyjściowych robota Kawasaki (AUX.0608-1).
8. Zrestartuj kontroler robota Kawasaki nr 2.
9. Ustaw kolejności sygnałów dla portu master ( AUX.0608-3).
10. Ustaw informacje o adapterze (robocie nr 1) oraz o liczbie wysyłanych / odbieranych bitów (sygnałów) podczas komunikacji (AUX.0608-9-4-1).
11. Zrestartuj kontroler robota Kawasaki nr 2.
1.3. Weryfikacja poprawności działania komunikacji
1. Włącz monitory protokołu Ethernet/IP przy użyciu teach pendant’ów obu robotów Kawasaki.
2. Konfiguracja robota Kawasaki nr 1 (adapter)
Ponieważ większość konfiguracji robota sprowadza się do ustawiania funkcji AUX przy pomocy teach pendant’a, na początek dowiesz się, w jaki sposób znaleźć te funkcje.
Przykładowo w podpunkcie 3.7 należy ustawić funkcję opisaną skrótem AUX.0608-1. Po uruchomieniu robota naciskasz na środkowym menu ekranu teach pendant’a, w efekcie czego wyświetla Ci się widoczne poniżej menu. Wybierasz „Aux Function”.
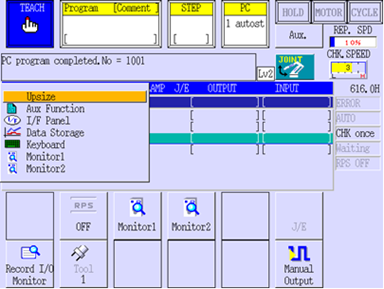
Następnie odczytujesz kolejne numery widoczne na skrócie. Skrót rozpoczyna się od „06”, więc wybierasz funkcję pod numerem 6 (Input/Output Signal).
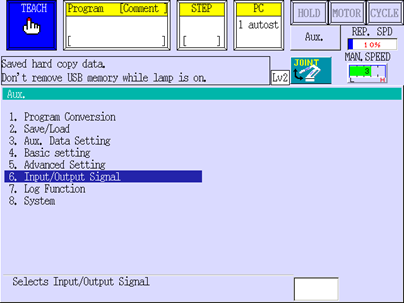
W następnej kolejności za numerem 06 znajduje się 08. Wybierz menu znajdujące się pod numerem 8 (Signal Allocation).
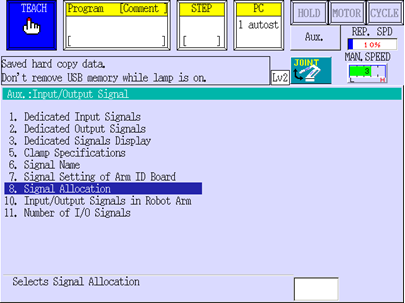
Skrót kończy się „1”, co analogicznie jak poprzednio oznacza, że wybierasz funkcję pod numerem pierwszym z menu „Signal Allocation”, która nazywa się „Allocate Signals to Ports”.
W ten sam sposób odszukaj pozostałe funkcje.
2.1 Fizycznie połącz porty ethernet’owe urządzeń z wykorzystaniem kabla RJ45 kategorii 5e lub wyższej (shielded cable) – przy wyłączonych kontrolerach robotów Kawasaki.
W przypadku robota do komunikacji w protokole Ethernet/IP wykorzystaj port 2 na kontrolerze. Ważne jest to, aby podczas fizycznego podłączania kabla kontroler robota Kawasaki był wyłączony.
2.2 Włącz kontroler robota Kawasaki nr 1.
2.3 Przypisz do portu slave software’owego protokołu Ethernet/IP (AUX.0608-2 ).

2.4 Przypisz adres IP do wykorzystywanego portu ethernetowego (AUX.0608-9-1).

2.5 Zrestartuj kontroler robota Kawasaki.
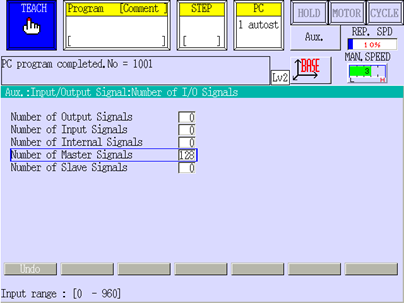
2.6 Ustaw odpowiednią liczbę sygnałów slave. (AUX.0611)
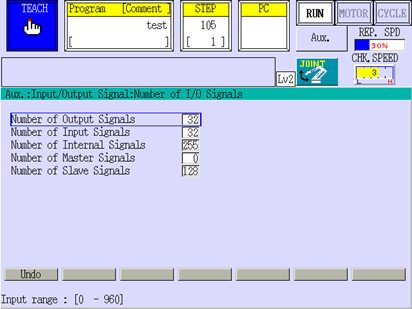
W powyższym przykładzie ustawiłeś/aś 128 sygnałów slave. Ważne, żebyś ustawił/a co najmniej tyle, ile zamierzasz wykorzystać.
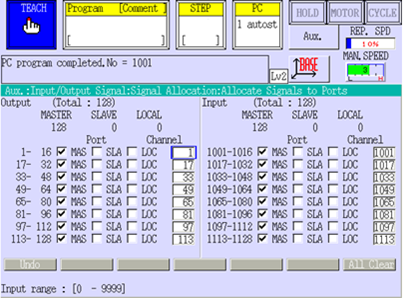
2.7 Przypisz sygnały (portów) SLAVE do odpowiednich sygnałów wejściowych/wyjściowych robota. (AUX.0608-1)
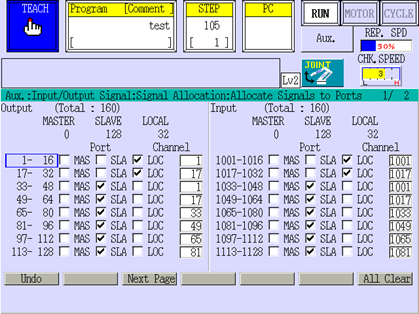
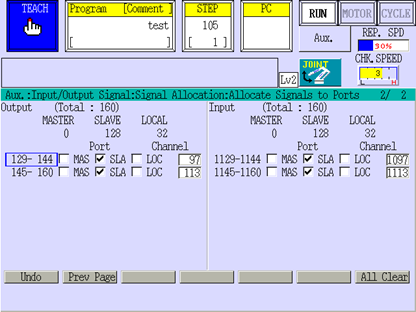
Jak widzisz na zamieszczonym przykładzie oprócz zaznaczenia (przypisania) sygnałom portu slave, musisz także w polach „Channel” wpisać numery sygnałów, jakim będą odpowiadać sygnały robota nr 1 na robocie nr 2.
W tym przypadku maksymalna liczba sygnałów, które możesz przypisywać do portów wynosi 128, jednak gdybyś ustawił/a więcej sygnałów z wykorzystaniem funkcji AUX0611, to tutaj też byłoby ich więcej. Maksymalnie możesz wykorzystać 960 sygnałów.
Najczęściej występujące problemy przy konfigurowaniu tego okna występują w przypadku próby przypisania portów master/slave/local do większej liczby sygnałów niż ustawionej przy użyciu funkcji AUX0611.
Oprócz tego zwróć uwagę na to, aby odpowiadające sobie sygnały wejściowe (input) oraz wyjściowe (output) były przypisane do tego samego portu. Zatwierdzenie ustawień może być także niemożliwe, jeżeli przy alokacji sygnałów nie będziesz korzystać z części sygnałów znajdujących się pomiędzy obszarami wykorzystywanych sygnałów (co odpowiada pozostawieniu pola channel równego 0), np. nie możesz korzystać z sygnałów 1 – 32 oraz 49 – 80, nie korzystając jednocześnie z sygnałów 33 – 48. Możesz natomiast korzystać np. z sygnałów 1 – 48, nie korzystając jednocześnie z sygnałów 49 – 80.
Istotną kwestią jest także to, że jeżeli chcesz móc korzystać z sygnałów fizycznych (dyskretnych wejść/wyjść) na robocie, to pierwsze 32 sygnały powinny być zdefiniowane jako lokalne (local). Rozpoczynając numerowanie sygnałów w komunikacji po sygnałach lokalnych – rozpocznij numerowanie w polu „channel” od 1.
2.8 Zrestartuj kontroler robota Kawasaki.
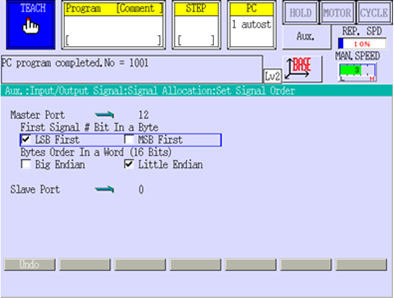
2.9 Ustaw kolejność sygnałów dla portu slave (AUX.0608-3)
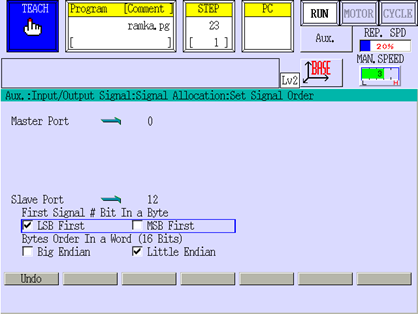
Ustawienie domyślne, czyli pokazane na powyższym przykładzie oznacza, że pierwszy sygnał (bit), który się zmieni w bajcie, to najmniej znaczący bit (LSB) oraz pierwszy bajt, który się zmieni w słowie (1 słowo = 2 bajty) to mniej znaczący bajt.
Jeżeli nie jest wymagana żadna konkretna konfiguracja kolejności zmiany bitów/bajtów, to zalecane jest pozostawienie tutaj ustawienia domyślnego. Naturalnie, takie samo ustawienie jak tutaj powinno być też wykorzystane przy konfiguracji drugiego robota Kawasaki.
2.10 Ustaw informację o liczbie wysyłanych / odbieranych bitów (sygnałów) podczas komunikacji. (AUX.0608-9-3)
Ustawienie to jest niezbędne, aby komunikacja pomiędzy urządzeniami mogła w ogóle zaistnieć. Zwróć uwagę na to, że w powyższym menu ustawiałeś liczbę wymienianych sygnałów w bajtach, w związku z czym ustawione wcześniej 128 sygnałów odpowiada 16 bajtom.
2.11 Wyłącz kontroler robota nr 1.
3. Konfiguracja robota nr 2 (scanner)
3.1 Fizycznie połącz porty ethernet’owych urządzeń z wykorzystaniem kabla RJ45 kategorii 5e lub wyższej (shielded cable) – przy wyłączonym kontrolerze robota Kawasaki.
W przypadku robota Kawasaki do komunikacji w protokole Ethernet/IP wykorzystujesz port 2 na kontrolerze. Ważne jest to, aby podczas fizycznego podłączania kabla, kontroler robota Kawasaki był wyłączony.
3.2 Włącz kontrolera robota Kawasaki.
3.3 Przypisz do portu master software’owy protokół Ethernet/IP. (AUX.0608-2)
3.4 Przypisz adres IP do wykorzystywanego portu ethernetowego. (AUX.0608-9-1)
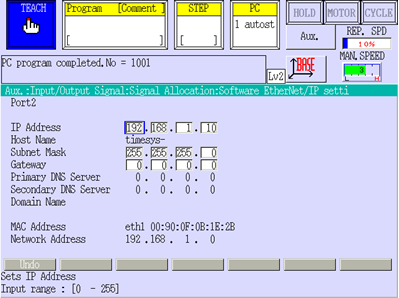
Tutaj zwróć uwagę na to, żeby IP robota nr 2 znajdowało się w tej samej podsieci, co IP robota nr 1 (tzn. że w rozważanym przykładzie IP mogą się różnić tylko liczbami za trzecią kropką – 192.168.1.32 i 192.168.1.10. Maska podsieci oraz bramka powinny być ustawione tak jak na drugim robocie.
3.5 Zrestartuj kontroler robota Kawasaki.
3.6 Ustaw odpowiednią liczbę sygnałów master. (AUX.0611)
W powyższym przykładzie ustawiłeś 128 sygnałów master, czyli tyle samo co na robocie Kawasaki nr 1. Ważne, żebyś ustawił/a co najmniej tyle, ile zamierzasz wykorzystać.
3.7 Przypisz sygnały (portów) master do odpowiednich sygnałów wejściowych/wyjściowych robota Kawasaki. (AUX.0608-1)
Jak widać na zamieszczonym przykładzie oprócz zaznaczenia (przypisania) sygnałom portu master, musisz także w polach „Channel” wpisać numery sygnałów, jakim będą odpowiadać sygnały robota Kawasaki nr 2 na robocie Kawasaki nr 1.
W tym przypadku maksymalna liczba sygnałów, które możesz przypisać do portów wynosi 128, jednak gdybyś ustawił/a więcej sygnałów z wykorzystaniem funkcji AUX0611, to tutaj też byłoby ich więcej. Maksymalnie możesz wykorzystać 960 sygnałów.
Najczęściej występujące problemy przy konfigurowaniu tego okna występują w przypadku próby przypisania portów master/slave/local do większej liczby sygnałów niż ustawionej przy użyciu funkcji AUX0611. Oprócz tego zwróć uwagę na to, aby odpowiadające sobie sygnały wejściowe (input) oraz wyjściowe (output) były przypisane do tego samego portu.
Zatwierdzenie ustawień może być także niemożliwe, jeżeli przy alokacji sygnałów nie będziesz korzystać z części sygnałów znajdujących się pomiędzy obszarami wykorzystywanych sygnałów (co odpowiada pozostawieniu pola channel równego 0), np. nie możesz korzystać z sygnałów 1 – 32 oraz 49 – 80, nie korzystając jednocześnie z sygnałów 33 – 48. Możesz natomiast korzystać np. z sygnałów 1 – 48, nie korzystając jednocześnie z sygnałów 49 – 80.
Istotną kwestią jest także to, że jeżeli chcesz móc korzystać z sygnałów fizycznych (dyskretnych wejść/wyjść) na robocie, to pierwsze 32 sygnały trzeba zdefiniować jako lokalne (local).
4.8 Zrestartuj kontroler robota Kawasaki.
3.9 Ustaw kolejności sygnałów dla portów master (AUX.0608-3)
Ustawienie domyślne, czyli pokazane na powyższym przykładzie oznacza, że pierwszy sygnał (bit), który się zmieni w bajcie to najmniej znaczący bit (LSB) oraz pierwszy bajt, który się zmieni w słowie (1 słowo = 2 bajty) to mniej znaczący bajt.
Jeżeli nie jest wymagana żadna konkretna konfiguracja kolejności zmiany bitów/bajtów, to zalecane jest pozostawienie tutaj ustawienia domyślnego. Naturalnie, takie samo ustawienie jak tutaj powinno być też wykorzystane przy konfiguracji drugiego robota Kawasaki.
3.10 Ustaw informacje o adapterze (robocie Kawasaki nr 1) oraz o liczbie wysyłanych / odbieranych bitów (sygnałów) podczas komunikacji. (AUX.0608-9-4-1)
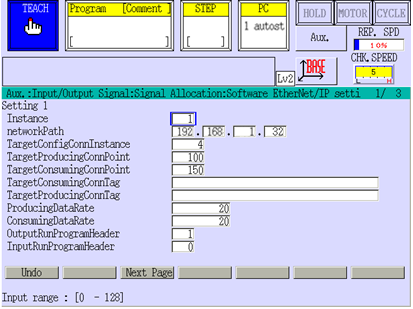
Kluczowymi ustawieniami w tym menu są adres IP urządzenia, z którym chcesz się połączyć, w Twoim przypadku drugiego robota Kawasaki, TargetConfigConnPoint / TargetProducingConnPoint / TargetConsumingConnPoint oraz Output/Input Run program Header, które trzeba ustawić tak jak w zamieszczonym przykładzie.
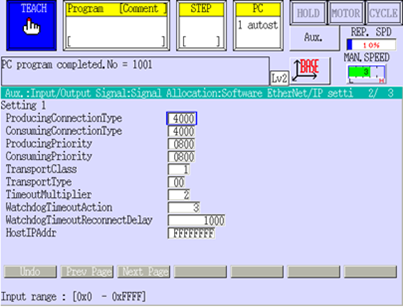
W tym oknie zaleca się pozostawienie ustawień domyślnych, o ile przed komunikacją nie zostały postawione żadne niestandardowe wymagania.
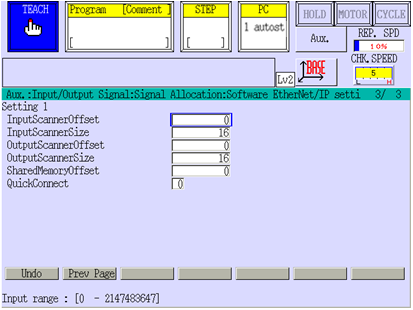
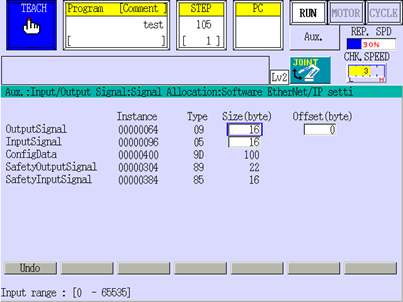
Ustaw odpowiedniej wielkości wejścia/wyjścia skanera. Jest to niezbędne, aby komunikacja pomiędzy urządzeniami mogła w ogóle zaistnieć. Ponieważ na robocie Kawasaki nr 1 ustawiłeś/aś wielkość wysyłanych i odbieranych danych na 16 bajtów, tutaj musisz definiować je tak samo.
W tym menu, wartości są wpisywane analogicznie jak dla menu na robocie Kawasaki nr 1 w bajtach, także musisz ustawić pola „Input Scanner Size” oraz „Output Scanner Size” właśnie na 16.
3.11 Zrestartuj kontroler robota Kawasaki.
4. Zweryfikuj poprawność działania komunikacji.
4.1 Włącz monitory protokołu Ethernet/IP przy użyciu teach pendant’ów obu robotów Kawasaki.
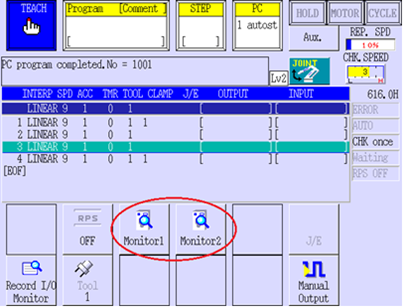
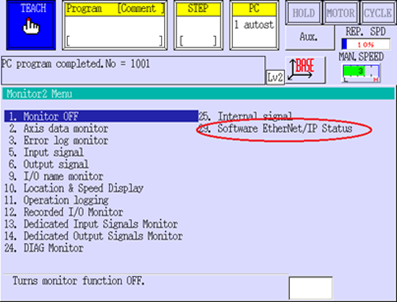
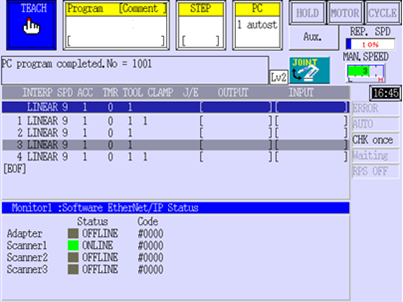
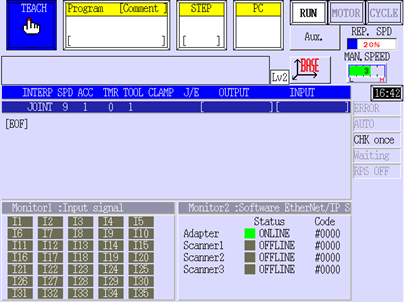
Jak widać, indykator przy napisie „Scanner1” w przypadku robota nr 2 oraz indykator „Adapter” w przypadku robota nr 1, informują, że poprawnie nawiązałeś/aś połączenie.
W przypadku, jeśli nie pojawiły się napisy „online” jak powyżej, upewnij się, czy liczba sygnałów wysyłanych oraz odbieranych przez oba roboty zgadza się ze sobą (weryfikując omówione wcześniej ustawienia).
Ponadto sprawdź, czy nie masz problemu z fizycznym połączeniem czy też z ustawionymi adresami IP robotów. Najłatwiej sprawdzić to poprzez wysłanie ping’ów do obu urządzeń. Jeżeli natomiast wszystko jest w porządku, możesz przejść do przetestowania poprawności parametrów komunikacji.
W następnym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem Kawasaki (skanerem) a sterownikiem Horner (adapterem) w protokole komunikacyjnym Ethernet IP.