
Roboty Kawasaki
48 postów 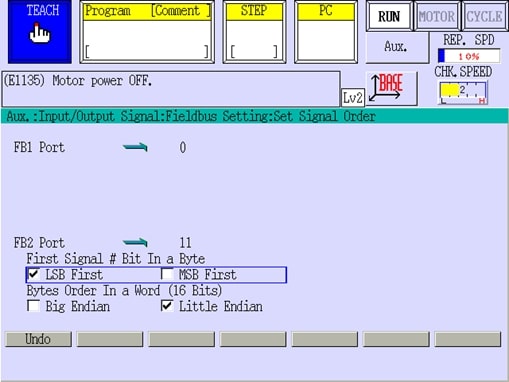

Bez kategorii
Robotowe porady techniczne: jak zmienić trajektorię robota za pomocą zewnętrznej siły?




Bez kategorii
Kawasaki RS007N i RS007L – japońska szybkość i precyzja

Bez kategorii
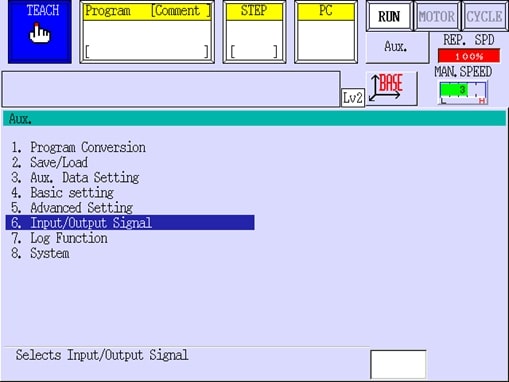
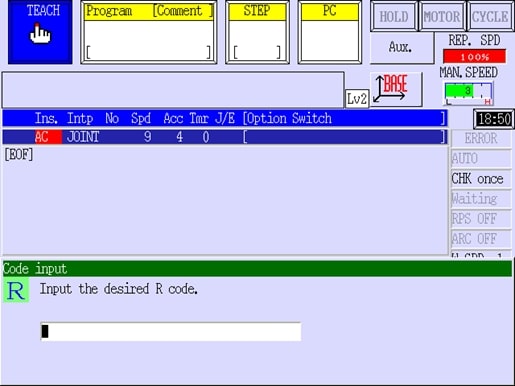
Ethernet/IP w robotach Kawasaki
