Roboty Kawasaki
48 postów Automatyka w praktyce
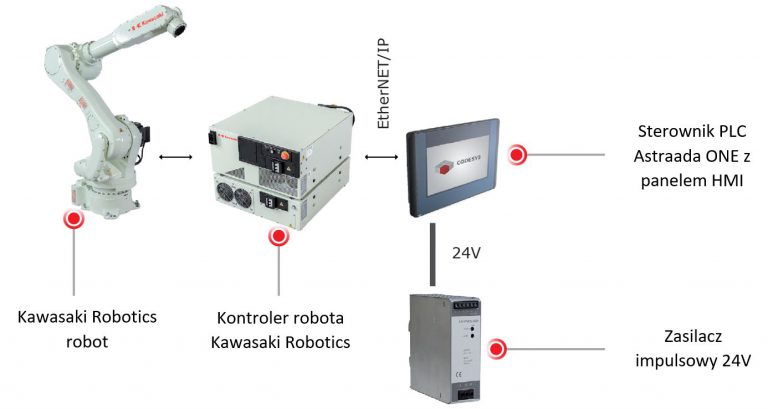
Ogólna modyfikacja komunikacji i zmiana typu danych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 6


Automatyka w praktyce
Przesyłanie aktualnej pozycji i dystansu do kolejnego punktu | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 5
Automatyka w praktyce
Przesyłanie dedykowanych sygnałów wejściowych i wyjściowych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 3

Podstawy automatyki
Coboty – wszystko, co musisz o nich wiedzieć

Automatyka w praktyce