Roboty Kawasaki
48 postów 
Podstawy automatyki
Robot spawalniczy i spawanie robotem spawalniczym – krótki przewodnik teoretyczny

Automatyka w praktyce
Jak przeprowadzić serwis robota przemysłowego?
Automatyka w praktyce
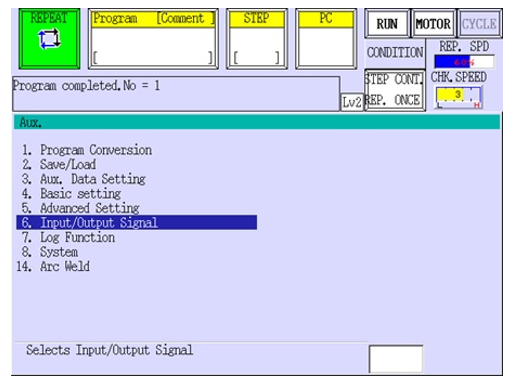
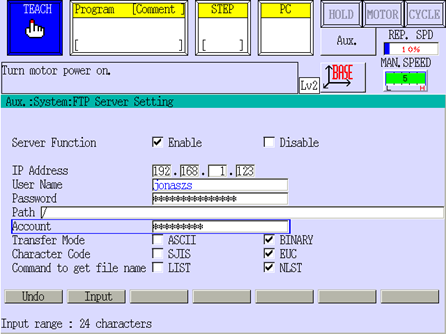
Jak skonfigurować i uruchomić komunikację EtherNet/IP CIP Safety w robotach Kawasaki Robotics z modułem Cubic-S
Automatyka w praktyce
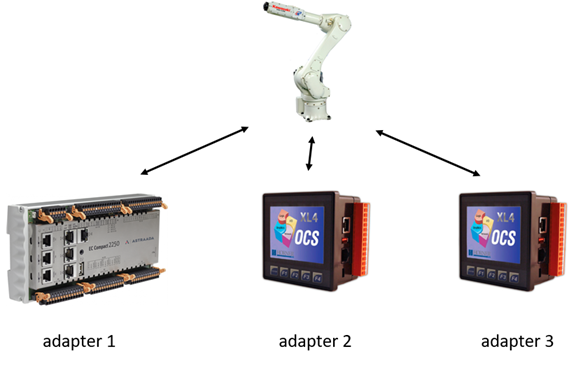
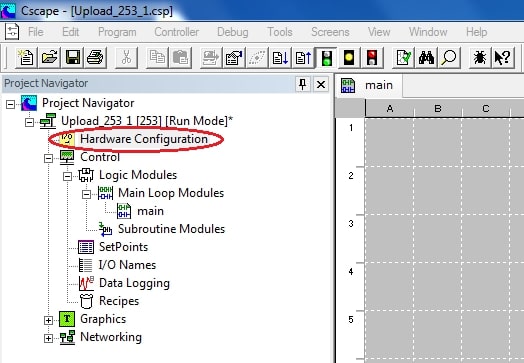
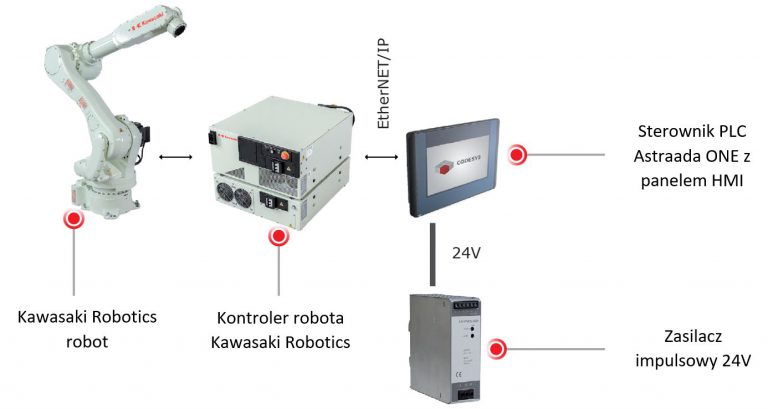
Integracja robota przemysłowego ze sterownikiem PLC i panelem HMI – dlaczego warto?
Automatyka w praktyce
K-Virtual: wydajne rozwiązanie CAD/CAM dla technologów zrobotyzowanego spawania



Bez kategorii
Cubic-S – jak działa i do czego służy opcjonalny moduł bezpieczeństwa w robotach Kawasaki Robotics?