Z czego składa się zestaw serwonapędowy?
Kurs obsługi i konfiguracji serwonapędów Astraada SRV odc. 1
Kontakt w sprawie artykułu: Rafał Pilch - 2023-06-30

Z tego artykułu dowiesz się:
- jakie są różnice między serwonapędami serii SRV-63 a SRV-64,
- jakie są elementy składowe zestawu serwonapędowego,
- jakie informacje zawierają numery katalogowe serwonapędów Astraada SRV.
Witaj w pierwszej lekcji naszego kursu, w ramach którego nauczysz się od podstaw obsługi i konfiguracji serwonapędów Astraada SRV.
Kurs obsługi i konfiguracji serwonapędów Astraada SRV
1. Z czego składa się zestaw serwonapędowy?2. Pierwsze podłączenie serwonapędu i przygotowanie do pracy.
3a. Sterowanie serwonapędem w EtherCAT – komunikacja i konfiguracja, część 1.
3b. Sterowanie serwonapędem w EtherCAT – komunikacja i konfiguracja, część 2.
4a. Sterowanie serwonapędem w Modbus RTU – komunikacja i konfiguracja, część 1
4b. Sterowanie serwonapędem w Modbus RTU – komunikacja i konfiguracja, część 2
5. Sterowanie Pulse Direction – jak sterować serwonapędem poprzez impulsy?
6. Czym jest oraz jakie możliwości daje tryb JOG?
7. Jak działa funkcja STO w serwonapędzie oraz jak podłączyć E-STOP?
Podstawowe pojęcia. Czym jest serwonapęd?
W myśl teorii serwonapęd to urządzenie, które pozwala na wprawienie w ruch maszyn przemysłowych, umożliwiając precyzyjne sterowanie pozycją, momentem oraz obrotami. Istotnymi parametrami serwonapędu są: prędkość obrotowa, moment siły oraz powiązana z nimi moc. Największymi pożądanymi zaletami serwonapędów są: prostota w obsłudze, rozmiar, dokładność oraz uniwersalność pod względem komunikacji.
Przy doborze serwonapędu należy pamiętać, aby jego moment siły pozwalał na pokonanie oporów stałych (takich jak opory tarcia), jak również oporów zmiennych (takich jak obciążenie serwosilnika podczas rozpędzania i hamowania osi).
Jeżeli chcesz dowiedzieć się więcej o tym, czym są serwonapędy, do czego służą i jak są zbudowane, przeczytaj artykuł Precyzyjne sterowanie ruchem. Czym są serwonapędy?
Astraada SRV-63, a Astraada SRV-64 – czym się różnią?
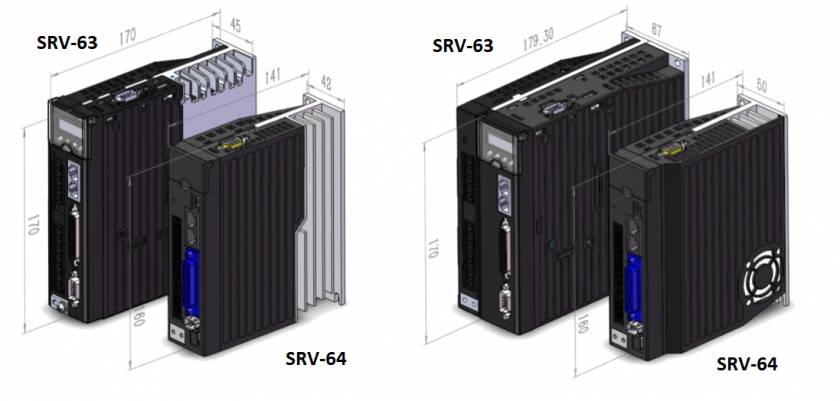
W tym kursie będziemy bazować na serwonapędach serii Astraada SRV. Występują one w dwóch wersjach: Astraada SRV-63, sprzedawaną od 2015 roku, oraz Astraada SRV-64, wprowadzoną na rynek w 2021 roku.
Serwonapędy SRV-63 pracują w zakresie mocy od 3 kW do 5 kW i są zasilane prądem trójfazowym. Natomiast modele z serii SRV-64 są zasilane prądem jednofazowym 230V i działają w przedziale od 0,2 kW do 2 kW. Obie serie są stale dostępne w ofercie ASTOR. Wyboru urządzenia z konkretnej serii dokonujemy w zależności od zakresów mocy, w których chcemy pracować.
Na pierwszy rzut oka możesz zauważyć, iż wzmacniacze oraz silniki w nowszej wersji są znacznie mniejsze, niż ich odpowiedniki z serii Astraada SRV-63. Nie znaczy to jednak, że są mniej efektywne. W wersji SRV-64, dzięki zastosowaniu enkodera ze zwiększoną rozdzielczością oraz nowym układem logicznym, mamy wyższą dokładność, jak również krótszy czas reakcji serwowzmacniaczy.
Programowanie urządzeń w obu wersjach nie różni się w istotny sposób. Jedyną większą modyfikacją w przypadku serwonapędu Astraada SRV-64, na którą należy zwrócić uwagę, jest złącze CN1. Należy upewnić się, czy wykorzystywane piny znajdują się w odpowiednich miejscach.
Elementy składowe serwonapędu Astraada SRV
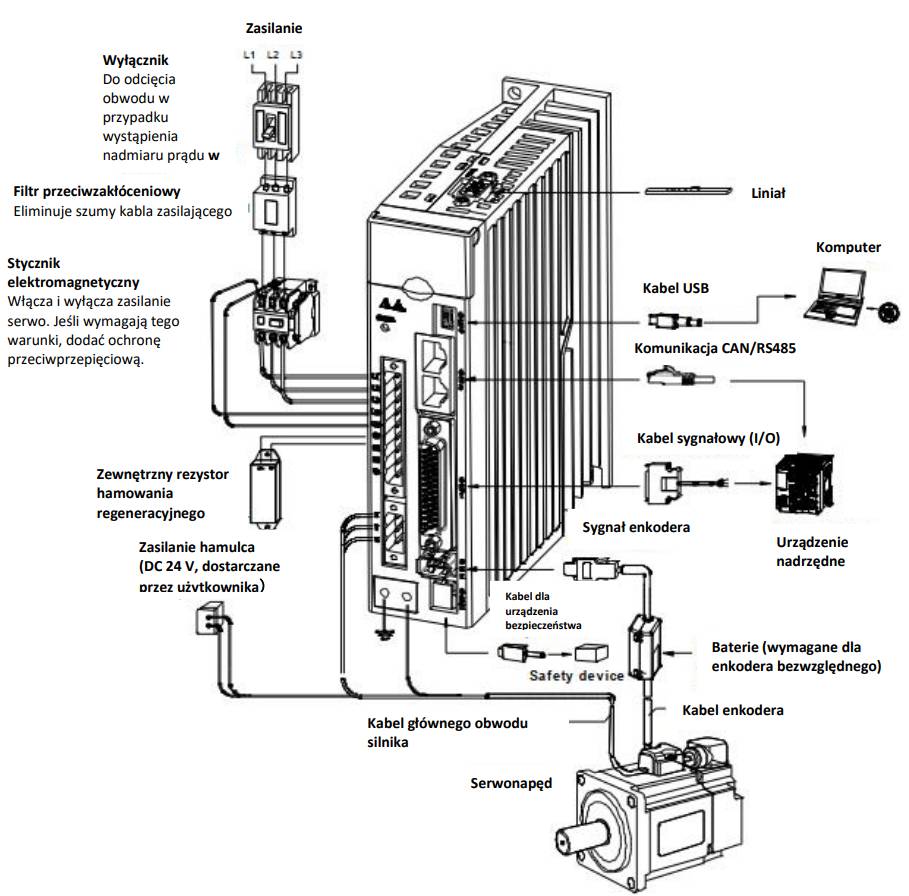
Serwonapęd ASTRAADA SRV składa się z silnika z wbudowanym enkoderem, opcjonalnie wyposażonego w hamulec, oraz wzmacniacza, który jest odpowiednio dopasowany do silnika. Warto pamiętać również o potrzebnych połączeniach: kablu zasilającym silnik oraz łączu do enkodera.
Ten drugi występuje w dwóch odmianach: kabel standardowy lub przewód z wbudowaną baterią. Mając do czynienia z połączeniem standardowym pamiętajmy, iż po wyłączeniu zasilania serwonapęd utraci informację o swojej pozycji. W tym przypadku wbudowany enkoder będzie pracował jako enkoder inkrementalny. Całkowitym przeciwieństwem jest kabel z wbudowaną baterią, gdyż w tym przypadku pozycja zostaje zapamiętywana, a enkoder należy uznać za absolutny.
Dodatkowo do elementów składowych można zaliczyć rezystor do rozpraszania energii, który stosujemy, gdy jest to konieczne, a także filtr lub ewentualnie transformator, dołączany ze względu na zgodność z wymogami dyrektywy CE.
Astraada SRV – wersja EtherCAT
Sterowanie serwonapędami w wersji EtherCAT realizowane jest z wykorzystaniem protokołu EtherCAT. Komunikacja umożliwia pracę w trybie obsługi pozycji, momentu oraz prędkości obrotowej naszego serwosilnika.
Protokół EtherCAT bazuje na warstwie fizycznej sieci Ethernet, wykorzystując jej istotne zalety: dużą prędkość transmisji danych oraz nieskomplikowany sposób konfiguracji. Więcej na temat tego protokołu dowiesz się z artykułu Dlaczego w sieciach przemysłowych EtherCAT jest lepszy niż klasyczny Ethernet?
Serwonapędy Astraada SRV mogą być łatwo zintegrowane w protokole EtherCAT ze sterownikami Astraada One. Możliwe są trzy warianty sterowania:
- Bez dodatkowych licencji – oznacza to, że poszczególne osie będą pracować jako osie niezależne.
- Z licencją SoftMotion – jest to przypadek w którym istnieje możliwość pracy osi w sprzężeniu, więc mogą pracować synchronicznie.
- Z licencją CNC – tak jak w poprzednim przypadku osie mogą również pracować synchroniczne, jednak do programowania ruchu można wykorzystać język G-CODE.
Więcej na ten temat przeczytasz w artykule Zastosowanie SoftMotion dla sterowników Astraada ONE do programowania serwonapędów w standardzie PLCopen.
Astraada SRV – wersja Standard
W przeciwieństwie do wyżej przedstawionej wersji EtherCAT odmiana Standard daje nam większe możliwości sterowania. Między innymi możemy komunikować się z urządzeniem za pomocą protokołu Modbus, Pulse-Direct lub CAN.
Serwonapęd Astraada SRV w wersji Standard posiada następujące warianty sterowania silnikiem:
- Modbus RTU – klasyczny protokół komunikacji stosowany w automatyce przemysłowej.
- Pulse-Direct – sterowanie odbywa się za pomocą impulsów wysyłanych przez sterownik PLC, innymi słowy dzięki sygnałom PULSE+SIGN lub przy użyciu zewnętrznego enkodera inkrementalnego. Serwonapęd posiada odpowiednie wejście impulsowe.
- Terminal I/O i sygnały analogowe – poprzez proste komendy w postaci sygnałów skierowanych na złącza terminala I/O i sygnałów analogowych.
- Tryb follower – możliwość podłączenia zewnętrznego enkodera i synchronizacji pracy dwóch serwonapędów.
W tym kursie skupimy się szczególnie na protokole Modbus RTU, będącym jednym z najbardziej znanych protokołów komunikacyjnych w systemach automatyki. Jest to protokół Master-Slave, w którym jedno urządzenie rozpoczyna komunikację (Master – urządzenie nadrzędne), a pozostałe jednostki (Slave – urządzenia podrzędne) są odpytywane poprzez zapytania nadane przez urządzenie master. Poprzez swoją niezawodność oraz prostotę wykorzystywany jest w serwonapędach z rodziny Astraada SRV w wersji Standard do wymiany danych w sieciach szeregowych RS-485. Pozwala on na dwukierunkową komunikację kilkuset urządzeń połączonych w tej samej sieci.
W budowie serwonapędów występują pewne elementy wspólne dla każdej z wyżej przedstawionych wersji. Pierwszą z nich jest STO będące wejściem Safe Torque Off, innymi słowy funkcją zapewniającą bezpieczne wyłączenie momentu silnika w przypadku pojawienia się awarii lub niepożądanego wyłączenia. Kolejną jest 16 bit analog stosowany do sterowania prędkością, momentem siły lub pozycją za pomocą sygnału +/- 10V.
Wersja Standard w swojej budowie posiada pełną zamkniętą pętlę pozwalającą na kontrolę pozycji za pomocą zewnętrznego urządzenia pomiarowego (np. liniału).
Poczytaj więcej o serwonapędach Astraada.
Silniki

Zakres obsługiwanych mocy:
0.2kW ~ 1kW przy zasilaniu 230VAC
1.5kW ~ 5.5kW przy zasilaniu 400VAC
Serwosilniki mogą pracować w temperaturze do 50 ˚C.
Serwosilniki Astraada występują z enkoderem absolutnym (serwonapęd posiada informacje
o pozycji), w wersji z hamulcem lub bez hamulca postojowego. Wariant z 21-bitowym enkoderem absolutnym zapewnia płynną regulację prędkości tudzież przy niskich obrotach, jak i wysoką precyzję pozycjonowania.
Wzmacniacze
Zakres obsługiwanych mocy:
0.2kW ~ 1kW przy zasilaniu 1-fazowym 230VAC, dla serii SRV – 64.
3kW ~ 5.5kW przy zasilaniu 3-fazowym 400VAC, dla serii SRV-63.
Przy doborze wzmacniacza istotnym jest, aby miał taką samą moc, jak silnik z nim współpracujący!
Serwowzmacniacze mogą pracować w temperaturze do 45 ˚C
Serwowzmacniacz przechowuje i przetwarza informacje o pozycji oraz prędkości w formacie 32-bitowym, co zapewnia dużą precyzję obliczeń. Czas aktualizacji pętli pozycji, prędkości oraz momentu siły wynosi 125µs.
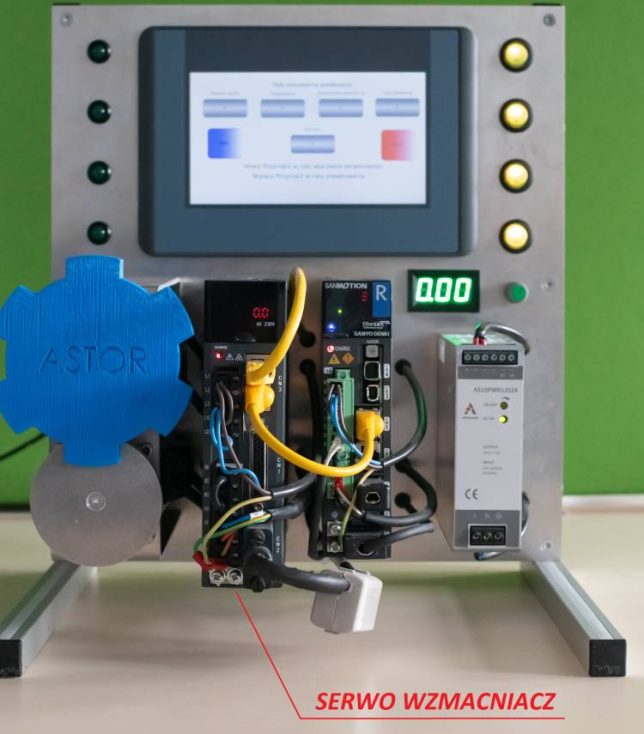
W górnej części serwowzmacniacza (pod klapką) można zauważyć 7-segmentowy wyświetlacz oraz przyciski pozwalające na zmianę parametrów pracy.
Numery katalogowe urządzeń Astraada SRV – znaczenie symboli
Numery katalogowe serwosilników Astraada mają następującą postać:
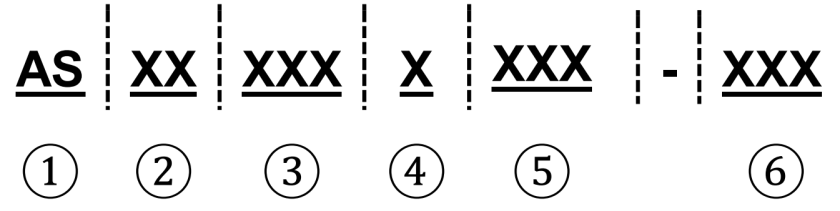
1. Kod marki: AS (Astraada).
2. Seria serwonapędów:
- 63 – serwonapędy serii Astraada SRV-63,
- 64 – serwonapędy serii Astraada SRV-64.
3. Kod produktu:
- SRV – serwowzmacniacze,
- MTR – serwosilniki bez hamulca,
- MTB – serwosilniki z hamulcem.
4. Zasilanie:
- 2 – jednofazowe 230 VAC,
- 4 – trójfazowe 3×400 VAC.
5. Moc:
- 0…9 – wartość mocy,
- C – oznacza przecinek (comma).
Przykładowo:
0C7 = 0,7 kW
4C0 = 4 kW
6. W przypadku silników – typ enkodera:
- A – enkoder absolutny,
- I – enkoder inkrementalny.
W przypadku wzmacniaczy – rodzaj komunikacji:
- S – Standard: Modbus RTU,
- E – EtherCAT,
- P – Profibus DP,
- C – CANopen.
Dla przykładu, na potrzeby tego kursu będziemy wykorzystywać silnik bez hamulca z enkoderem absolutnym AS64MTR20C2-A, w połączeniu z serwowzmacniaczem AS64SRV20C2-E.
Kable
Przy odpowiednim doborze kabli należy wziąć pod uwagę moc wybranego silnika, napięcie zasilania oraz podtrzymanie bateryjne. Bardzo istotnym faktem w przypadku kabla bez baterii jest brak zapamiętania pozycji po utracie zasilania przez enkoder absolutny. Należy
o tym pamiętać!
Kable zasilające oraz kable do enkoderów łączące serwosilniki z serwowzmacniaczami Astraada SRV możemy podzielić na:
- Kable zasilające do enkoderów absolutnych lub inkrementalnych,
- Kable do enkodera z lub bez podtrzymania bateryjnego,
- Kable do enkodera inkrementalnego.
Dostępne są kable o długości 3 m, 5 m, 10 m lub 20 m.
W celu dokładnej weryfikacji poszukiwanych składowych skorzystaj z dokumentacji,
a następnie skomplementuj swój własny zestaw: Kable zasilające, Kable do enkodera
W następnym odcinku: Pierwsze podłączenie serwonapędu i przygotowanie do pracy.
Sprawdź ofertę serwonapędów w sklepie internetowym firmy ASTOR.

Autor kursu:
Marcin Ryznar
Student Akademii Górniczo-Hutniczej w Krakowie, na kierunku Automatyka i Robotyka



