
Strona główna ASTOR
Kawasaki
41 postów
Automatyka w praktyce
Jak przeprowadzić serwis robota przemysłowego?
Pod lupę bierzemy etapy serwisu robota przemysłowego Kawasaki Robotics w firmie Tauron… 2023-09-14 Adrian Kociarz
Jak przeprowadzić serwis robota przemysłowego?
Pod lupę bierzemy etapy serwisu robota przemysłowego Kawasaki Robotics w…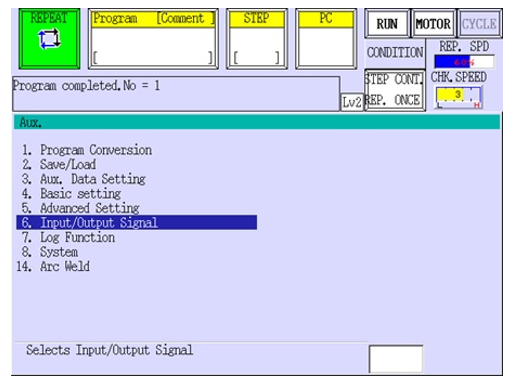
Automatyka w praktyce
Jak skonfigurować i uruchomić komunikację EtherNet/IP CIP Safety w robotach Kawasaki Robotics z modułem Cubic-S
Poznaj podstawy konfiguracji i uruchomienia bezpiecznej komunikacji Ethernet/IP CIP Safety na przykładzie… 2023-02-09 Piotr Kaczorowski
Jak skonfigurować i uruchomić komunikację EtherNet/IP CIP Safety w robotach Kawasaki Robotics z modułem Cubic-S
Poznaj podstawy konfiguracji i uruchomienia bezpiecznej komunikacji Ethernet/IP CIP Safety…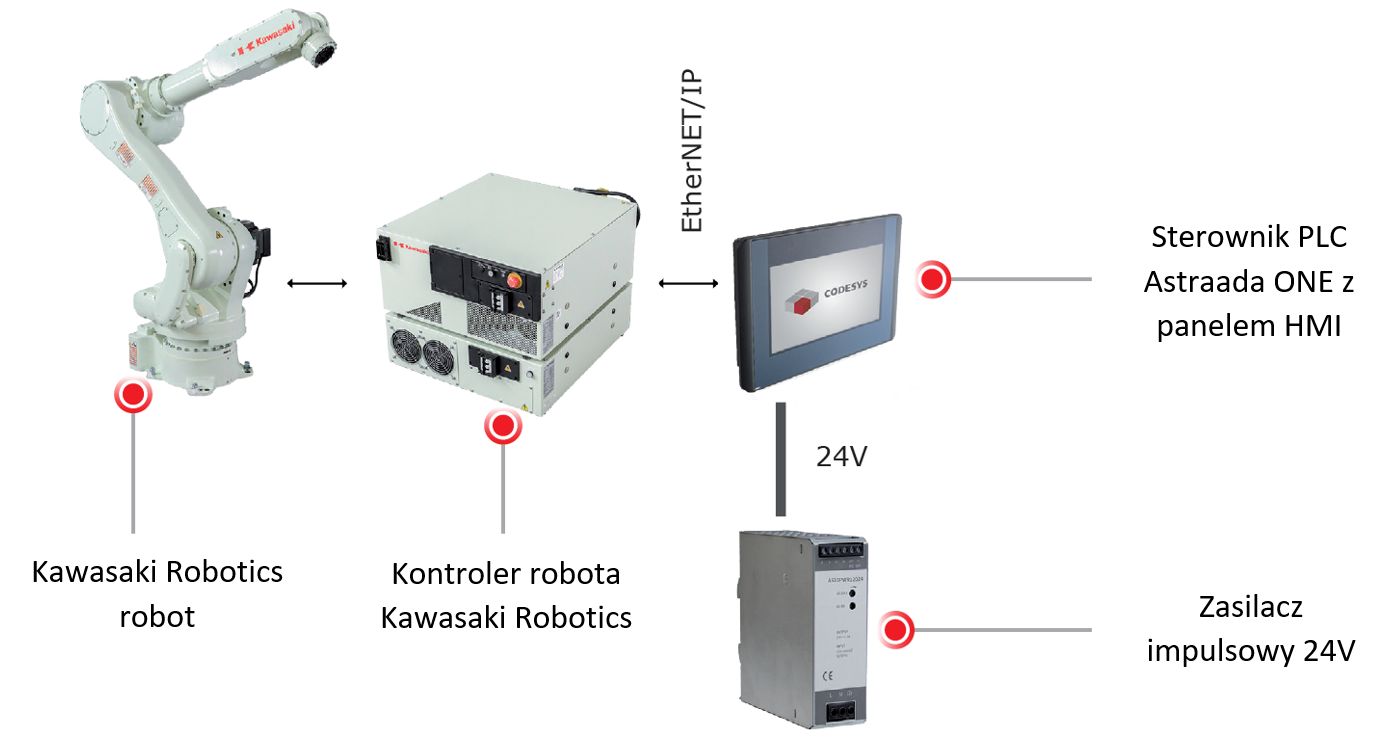
Automatyka w praktyce
Integracja robota przemysłowego ze sterownikiem PLC i panelem HMI – dlaczego warto?
Jaki sens ma łączenie robota przemysłowego z panelem operatorskim albo sterownikiem PLC?… 2023-02-04 Konrad Sendrowicz
Integracja robota przemysłowego ze sterownikiem PLC i panelem HMI – dlaczego warto?
Jaki sens ma łączenie robota przemysłowego z panelem operatorskim albo…
Automatyka w praktyce
K-Virtual: wydajne rozwiązanie CAD/CAM dla technologów zrobotyzowanego spawania
K-Virtual to innowacyjne oprogramowanie, dzięki któremu technolodzy spawania mogą szybciej i łatwiej… 2023-01-09 Kamil Majcher
K-Virtual: wydajne rozwiązanie CAD/CAM dla technologów zrobotyzowanego spawania
K-Virtual to innowacyjne oprogramowanie, dzięki któremu technolodzy spawania mogą szybciej…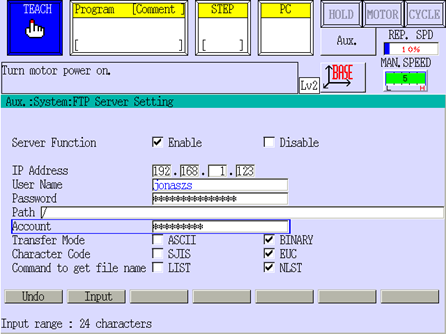
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics z kontrolerem… 2022-03-10 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics…
Bez kategorii
Jak zapewnić bezawaryjne działanie kontrolerów do robotów w różnych warunkach przemysłowych na przykładzie F60 od Kawasaki Robotics.
Kontroler jest jednostką sterującą do robotów przemysłowych. Kontroler pełni funkcję mózgu całej… 2022-03-04 Klaudia Rzeszowska
Jak zapewnić bezawaryjne działanie kontrolerów do robotów w różnych warunkach przemysłowych na przykładzie F60 od Kawasaki Robotics.
Kontroler jest jednostką sterującą do robotów przemysłowych. Kontroler pełni funkcję…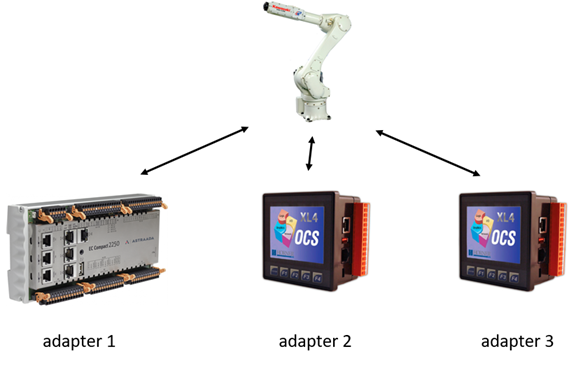
Bez kategorii
Konfiguracja więcej niż jednego urządzenia typu adapter w komunikacji z robotem Kawasaki – skanerem – w protokole Ethernet/IP – odc.7
W tym odcinku dowiesz się jak skonfigurować komunikację więcej niż jednego urządzenia… 2021-05-28 Tomasz Fuchs
Konfiguracja więcej niż jednego urządzenia typu adapter w komunikacji z robotem Kawasaki – skanerem – w protokole Ethernet/IP – odc.7
W tym odcinku dowiesz się jak skonfigurować komunikację więcej niż…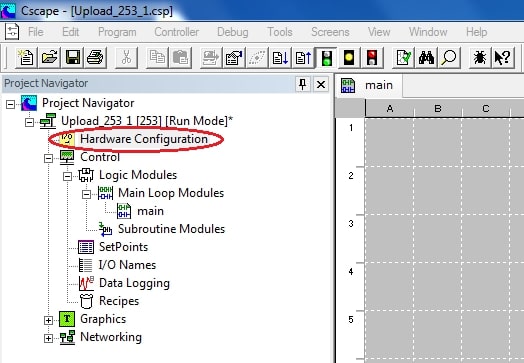
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki – skanerem – a sterownikiem Horner – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.6
W tym odcinku znajdziesz informacje dotyczące sposobu konfiguracji robota Kawasaki - skanera… 2021-05-21 Tomasz Fuchs
Konfiguracja komunikacji pomiędzy robotem Kawasaki – skanerem – a sterownikiem Horner – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.6
W tym odcinku znajdziesz informacje dotyczące sposobu konfiguracji robota Kawasaki…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotami Kawasaki w protokole komunikacyjnym Software Ethernet IP – odc.5
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotami Kawasaki oraz… 2021-05-10 Tomasz Fuchs
Konfiguracja komunikacji pomiędzy robotami Kawasaki w protokole komunikacyjnym Software Ethernet IP – odc.5
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotami…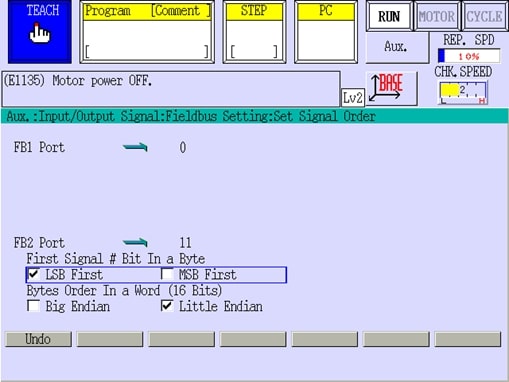
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
Witaj w kolejnym odcinku kursu Ethernet IP w robotach Kawasaki. Pokażemy Ci… 2021-05-04 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
Witaj w kolejnym odcinku kursu Ethernet IP w robotach Kawasaki.…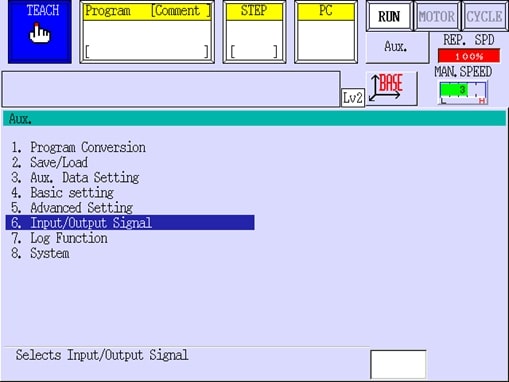
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem Kawasaki z… 2021-04-19 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.2
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem kawasaki z… 2021-04-15 Jonasz Sobaniec