
Strona główna ASTOR
Roboty Kawasaki
46 postów
Automatyka w praktyce
Jak zadbać o swojego robota na co dzień? Przeglądy okresowe robotów Kawasaki Robotics
W poprzednich artykułach pisaliśmy o tym, jak wykonać kopię bezpieczeństwa aplikacji robota… 2026-01-19 Konrad Sendrowicz
Jak zadbać o swojego robota na co dzień? Przeglądy okresowe robotów Kawasaki Robotics
W poprzednich artykułach pisaliśmy o tym, jak wykonać kopię bezpieczeństwa…
Automatyka w praktyce
Jak zadbać o swojego robota na co dzień? Zdalna diagnostyka robotów Kawasaki Robotics
W artykule „Jak wykonać kopię zapasową robota Kawasaki Robotics w 5 krokach”… 2026-01-19 Konrad Sendrowicz
Jak zadbać o swojego robota na co dzień? Zdalna diagnostyka robotów Kawasaki Robotics
W artykule „Jak wykonać kopię zapasową robota Kawasaki Robotics w…
Automatyka w praktyce
Wykrywanie obiektu „w locie” na robotach Kawasaki Robotics – porównanie funkcji HSENSE oraz XMOVE
W pewnym uproszczeniu można powiedzieć, że robot pracujący w aplikacji z pola… 2025-07-07 Piotr Kaczorowski
Wykrywanie obiektu „w locie” na robotach Kawasaki Robotics – porównanie funkcji HSENSE oraz XMOVE
W pewnym uproszczeniu można powiedzieć, że robot pracujący w aplikacji…
Automatyka w praktyce
Jak skonfigurować komunikację Profinet w kontrolerze Kawasaki Robotics serii E
Z tego artykułu dowiesz się, jak skonfigurować protokół komunikacyjny Profinet dla robotów… 2025-07-01 Konrad Sendrowicz
Jak skonfigurować komunikację Profinet w kontrolerze Kawasaki Robotics serii E
Z tego artykułu dowiesz się, jak skonfigurować protokół komunikacyjny Profinet…
Podstawy automatyki
Jakie cechy musi posiadać robot do paletyzacji?
Roboty paletyzujące muszą spełniać określone wymagania techniczne oraz operacyjne, aby efektywnie realizować… 2025-05-28 Łukasz Giza
Jakie cechy musi posiadać robot do paletyzacji?
Roboty paletyzujące muszą spełniać określone wymagania techniczne oraz operacyjne, aby…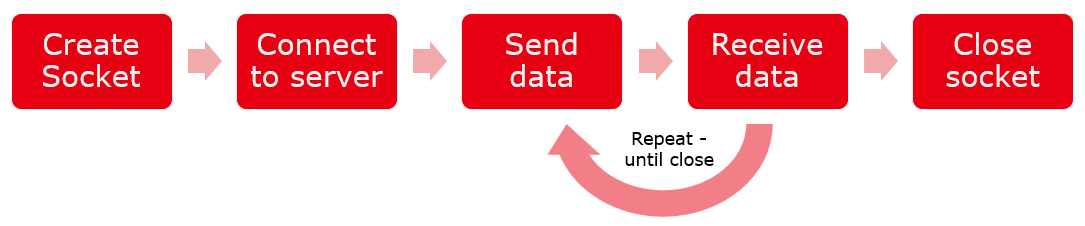
Automatyka w praktyce
Połączenie terminalowe sterownika PLC Astraada One z robotem Kawasaki Robotics
W tym artykule pokażemy, jak w praktyce realizować połączenie pomiędzy sterownikiem PLC… 2025-05-27 Konrad Sendrowicz
Połączenie terminalowe sterownika PLC Astraada One z robotem Kawasaki Robotics
W tym artykule pokażemy, jak w praktyce realizować połączenie pomiędzy…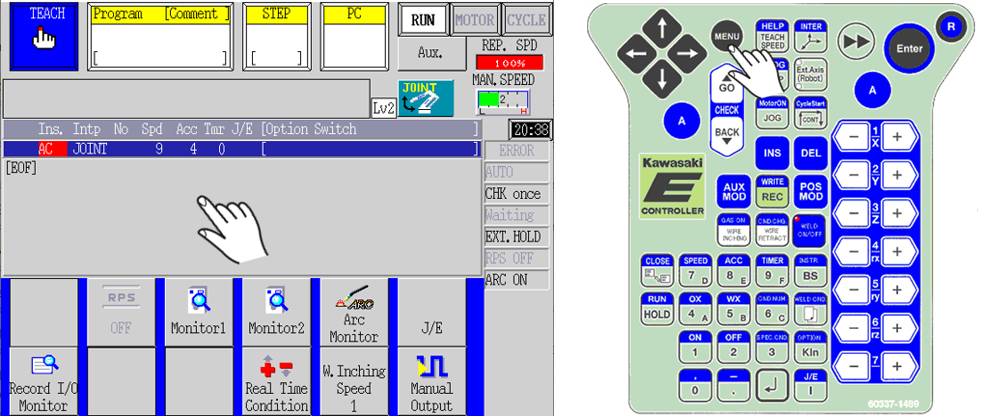
Automatyka w praktyce
Jak wykonać kopię zapasową robota Kawasaki Robotics w 5 krokach?
Z tego artykułu dowiesz się jak prawidłowo wykonać kopię zapasową robota Kawasaki… 2025-05-19 Konrad Sendrowicz
Jak wykonać kopię zapasową robota Kawasaki Robotics w 5 krokach?
Z tego artykułu dowiesz się jak prawidłowo wykonać kopię zapasową…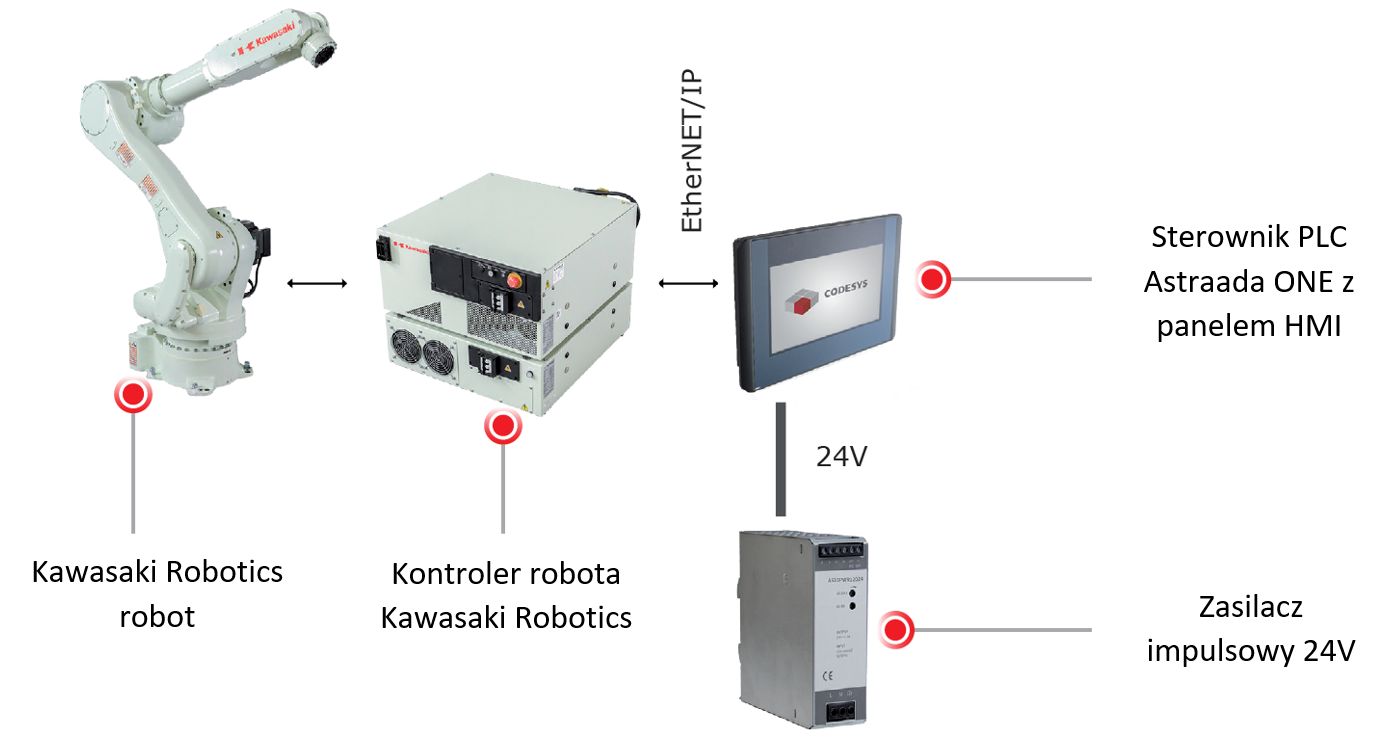
Automatyka w praktyce
Przesyłanie ze sterownika PLC do robota pełnej nazwy programu do wykonania | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 11
To ostatnia część naszego poradnika, wykorzystująca poprzednie artykuły dotyczące przesyłania ciągu znaków.… 2025-03-11 Konrad Sendrowicz
Przesyłanie ze sterownika PLC do robota pełnej nazwy programu do wykonania | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 11
To ostatnia część naszego poradnika, wykorzystująca poprzednie artykuły dotyczące przesyłania… Automatyka w praktyce
Przesyłanie do sterownika PLC historii ostatnich błędów z robota | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 10
W tej części przygotowana zostanie procedura przesłania 50 ostatnich błędów z robota… 2025-03-07 Konrad Sendrowicz
Przesyłanie do sterownika PLC historii ostatnich błędów z robota | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 10
W tej części przygotowana zostanie procedura przesłania 50 ostatnich błędów… Automatyka w praktyce
Odbieranie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 9
W tej części poradnika pokażemy, jak odebrać zmienną tekstową od sterownika PLC,… 2025-01-07 Konrad Sendrowicz
Odbieranie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 9
W tej części poradnika pokażemy, jak odebrać zmienną tekstową od… Automatyka w praktyce
Wysyłanie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 8
W tej części poradnika pokażemy, jak wysłać z robota zmienną tekstową za… 2025-01-06 Konrad Sendrowicz
Wysyłanie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 8
W tej części poradnika pokażemy, jak wysłać z robota zmienną… Automatyka w praktyce
Przesyłanie dużych ilości danych przy użyciu ograniczonej liczby zajętych bitów – zwielokrotnianie danych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 7
Z tej części poradnika dowiesz się, jak wysyłać dużą ilość informacji z… 2025-01-03 Konrad Sendrowicz