Webinar „Kawasaki – KIDE+K-ROSET: symulacja pracy stanowiska zrobotyzowanego offline” [NAGRANIE]
Kontakt w sprawie artykułu: Ewelina Szędzioł - 2020-07-13
Z tego filmu dowiesz się:
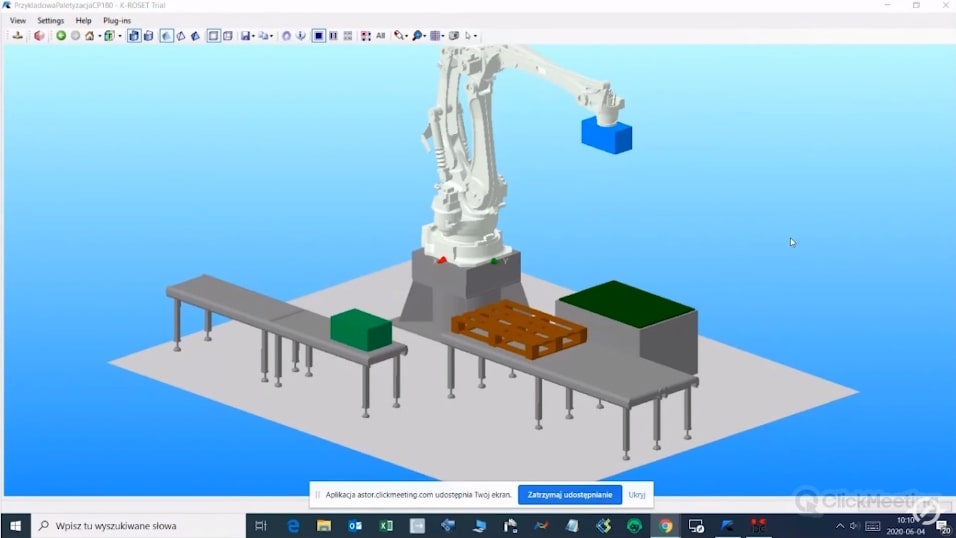
- w jaki sposób można wykorzystać program K-ROSET do symulacji stanowiska zrobotyzowanego,
- w jaki sposób połączyć środowisko KIDE z wirtualnym robotem w symulatorze K-ROSET i wykorzystać do wygodnego tworzenia aplikacji,
- w jaki sposób wykorzystać środowisko KIDE do definiowania zmiennych liczbowych, zmiennych pozycji, sygnałów, programów ruchu, programów równoległych jak również w jaki sposób przetestować działanie aplikacji,
- poznasz przydatne cechy i funkcjonalności programów K-ROSET oraz KIDE.
Film prezentuje zagadnienia, na które warto zwrócić uwagę na etapie tworzenia symulacji aplikacji zrobotyzowanej w środowisku K-ROSET. Daje obraz tego, jaki wpływ na tworzoną symulację mogą mieć parametry pracy robota oraz pozycje elementów w aplikacji. Ponadto prezentuje jak wykorzystać środowisko KIDE do modyfikowania tych parametrów tak, aby w szybki sposób sprawdzić ich wpływ na symulację.
PROWADZĄCY:
@Tomasz Fuchs – Ekspert ds. systemów zrobotyzowanych ASTOR
Chcesz wiedzieć więcej w tym temacie?
Odwiedź stronę Kawasaki