Tory jezdne dla robotów przemysłowych, czyli jak zwiększyć elastyczność przestrzeni produkcyjnych
Kontakt w sprawie artykułu: Marek Niewiadomski - 2019-11-05

Z tego artykułu dowiesz się:
- Do czego służą tory jezdne
- Jakie są rodzaje torów jezdnych
- Jaki wybrać tor jezdny w zależności od aplikacji
- Dlaczego warto stosować tory jezdne
Chcesz, aby jeden robot przemysłowy wykonywał wiele różnych zadań? Lub kilka robotów – to samo zadanie? Potrzebujesz zwiększyć zasięg robota i pozwolić pracować z detalami, które w przypadku przykotwienia robota do posadzki nie były możliwe do obsługi?
Do tego służą tory jezdne, przenoszące roboty pomiędzy stacjami. Tory jezdne, zwane także jednostkami do przenoszenia robotów lub systemami siódmej osi, są coraz bardziej powszechne w przypadku montażu, spawania na dużą skalę i magazynowania.
Tory jezdne dla robotów mogą faktycznie zwiększyć elastyczność przestrzeni produkcyjnych, ale muszą być szybkie, dokładne i bezpieczne, aby spełniały założone cele.
Bez względu na morfologię robota, celem dodatkowej osi jest dodanie ruchu liniowego. Powiększa to obszar roboczy albo pozwala robotowi transportować obrabiane przedmioty lub narzędzia. W niektórych układach ten pierwszy umożliwia robotowi obsługę wielu maszyn naraz lub pobieranie palety z rzędów lub obróbkę bardzo dużych detali. W przypadku tych ostatnich powszechnymi zastosowaniami są pakowanie, spawanie, cięcie plazmowe i inne zadania mechaniczne.
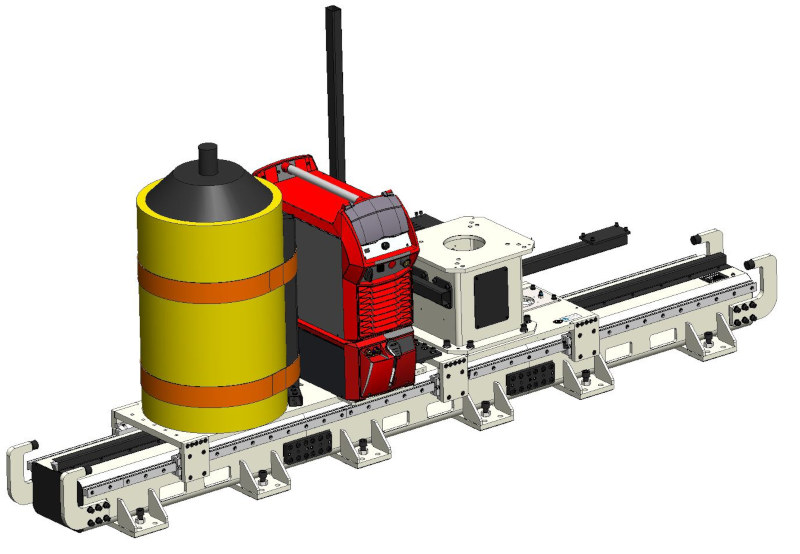
Firma ASTOR idąc za potrzebami klientów, oferuje tory jezdne przeznaczone dla robotów Kawasaki, rozszerzając tym sposobem gamę swoich produktów nie tylko o pozycjonery, ale także o jednostki liniowe. Przyjrzyjmy się dla przykładu torowi jezdnemu TRK500.
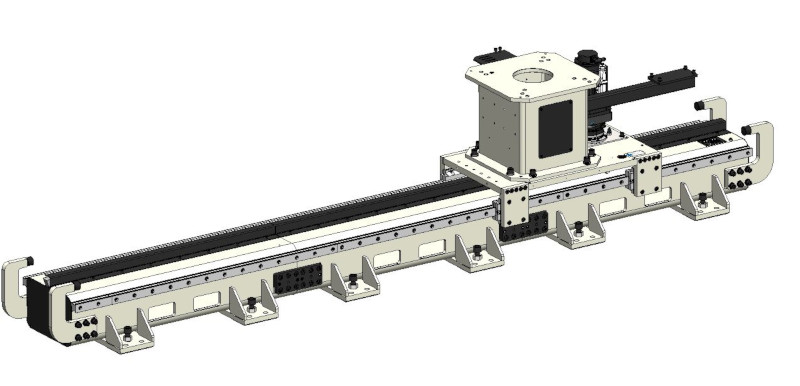
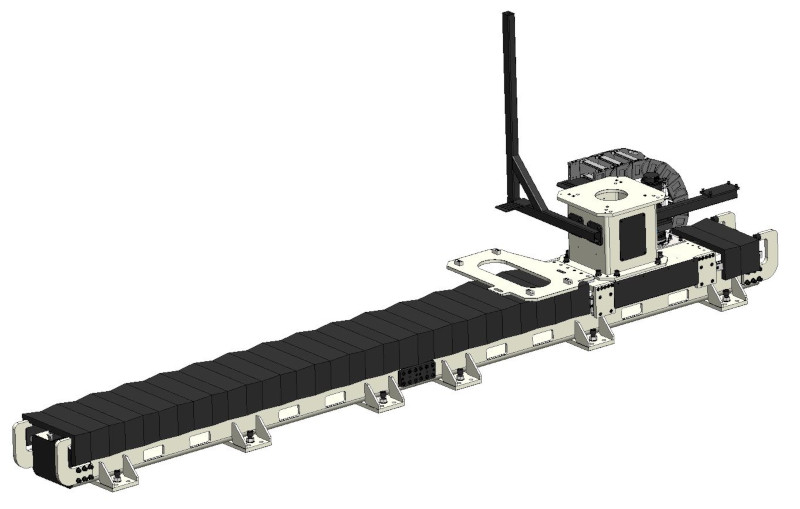
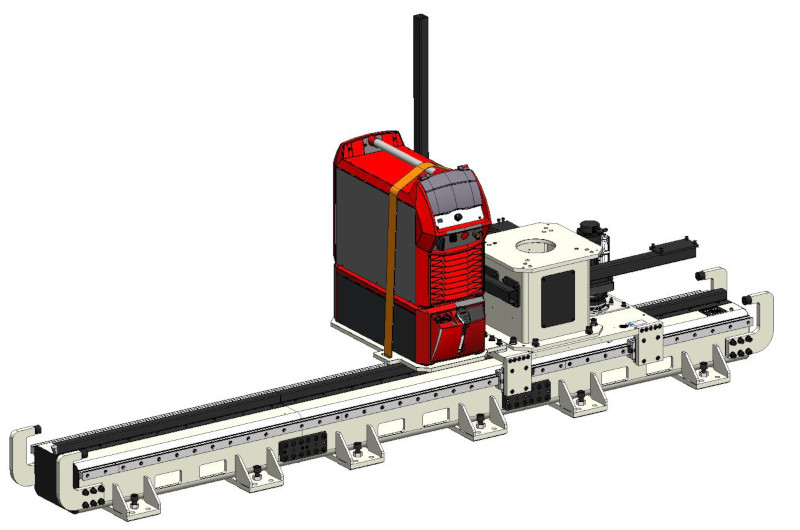
TRK500 – modułowy tor jezdny pod średnie udźwigi
Tor jezdny TRK500 do pracy z robotami o małym udźwigu (do 20 kg) ma modułową, kompaktową konstrukcję, która świetnie sprawdza się w zakładach, gdzie przestrzeń montażu jest bardzo ograniczona. TRK500 składa się podstawowych modułów o długości 1 m oraz 2 m. Dzięki modułowej konstrukcji, tor można skrócić lub wydłużyć bez większej ingerencji w maszynę.
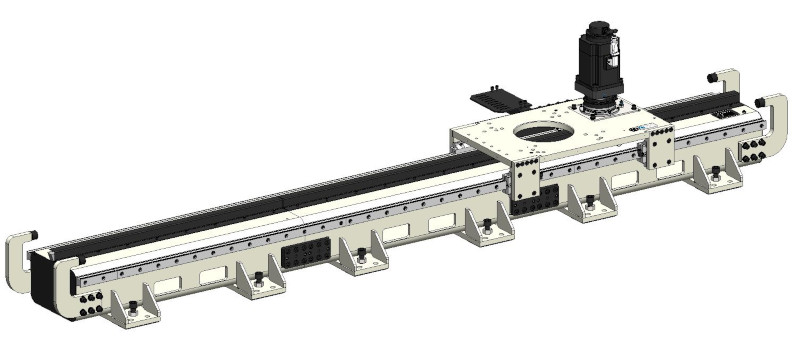
TRK500 współpracuje z robotami Kawasaki serii BA, RA oraz RS (do modelu RS020N).
TRK500 – do różnych aplikacji procesowych
TRK500 jest przystosowany do pracy z wieloma wózkami – w przypadku, gdy więcej niż jeden robot musi wykonywać określone zadanie. Wózki toru dostępne są z dodatkowymi płytami, które pozwalają zamontować dodatkowy osprzęt do określonych zastosowań, takich jak spawanie łukowe, uszczelnianie czy malowanie.
Łańcuch kablowy TRK500 może zostać dostarczony z odpowiednimi kablami (kable masowe do spawania łukowego, różne kable zasilające i sygnałowe będące na wyposażeniu hali produkcyjnej Klienta). Cokoły dla robotów zostały tak dobrane, aby maksymalnie zoptymalizować pracę z pozycjonerami ASTOR serii PST.
Cały tor może zostać dostarczony z osłonami harmonijkowymi, które dodatkowo zabezpieczają go przed szkodliwymi warunkami środowiska zewnętrznego.
Wyjątkowa szybkość i dokładność
Dzięki zastosowaniu wysokiej klasy komponentów, tor jezdny TRK500 jest w stanie przemieszczać roboty lub ciężar o wadze dochodzącej do 800 kg z prędkością do 2m/s oraz przyspieszeniem 5m/s2 – 0.5G! Wszystkie te parametry przy zachowaniu powtarzalności pracy na poziomie ±0,05 mm (!).
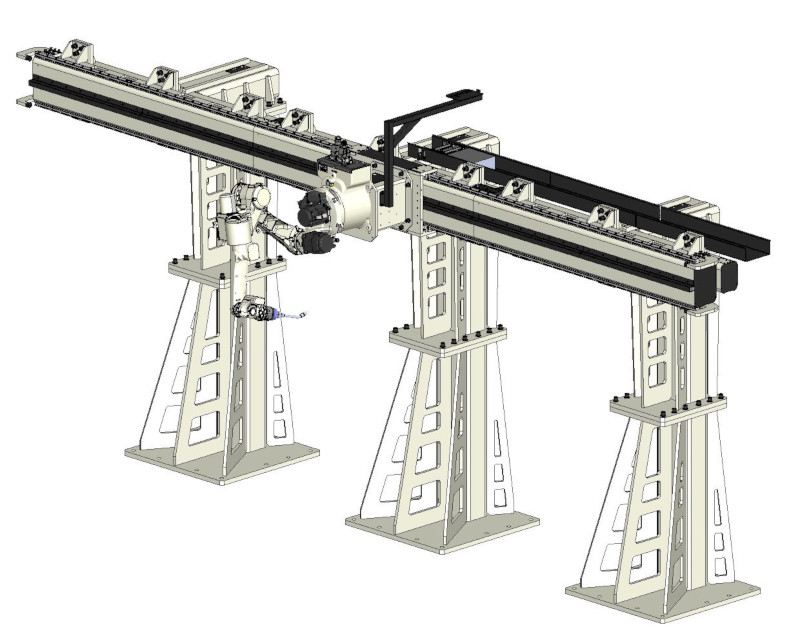
Uniwersalność ponad wszystko
Dzięki modułowej konstrukcji i wytrzymałości możliwe jest zamontowanie toru nie tylko na posadzce. TRK500 można montować także w pozycji bocznej, a także na suficie. Specjalnie przygotowane do tego słupowysięgniki pozwalają na pracę robota w dowolnej orientacji.
Przyszłość
Oferta osprzętu robotyki powiększa się – tor o udźwigu 2000 kg jest w fazie rozwojowej. Dostępny będzie dla klientów ASTOR od pierwszego kwartału 2020 r.
Dlaczego warto stosować tory jezdne?
- powtarzalność pozwalająca na zastosowanie każdego procesu spawania,
- przygotowanie do różnych zastosowań,
- zwartość i modułowość,
- wysoka niezawodność, niskie wymagania konserwacyjne, łatwa naprawa,
- szeroki zakres opcji dla różnych konfiguracji,
- łatwość modyfikacji – zmiana długości.