Automatyka w praktyce Kawasaki Robotics RF007L – nowy robot dla branży spożywczej Radosław Kołacz 2026-03-27
Automatyka w praktyce Automatyzacja procesu sortowania z wykorzystaniem robota Astorino Łukasz Giza 2026-03-12
Automatyka w praktyce Jak zadbać o swojego robota na co dzień? Przeglądy okresowe robotów Kawasaki Robotics Konrad Sendrowicz 2026-01-19
Automatyka w praktyce Jak zadbać o swojego robota na co dzień? Zdalna diagnostyka robotów Kawasaki Robotics Konrad Sendrowicz 2026-01-19
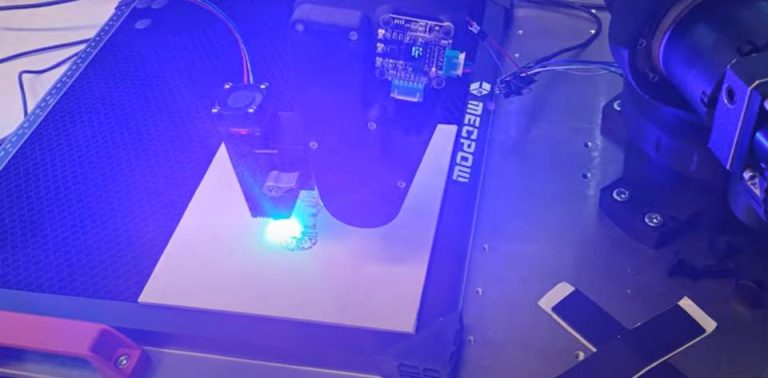
Automatyka w praktyce Stanowisko do grawerowania laserowego z wykorzystaniem robota edukacyjnego Astorino Kamila Piechocka 2025-10-01
Automatyka w praktyce Komunikacja falownika Astraada DRV-260 ze sterownikiem PLC Horner Canvas 7 w protokole Modbus TCP oraz sterowanie falownikiem za pomocą panelu HMI sterownika Kamil Jaszczur 2025-09-24
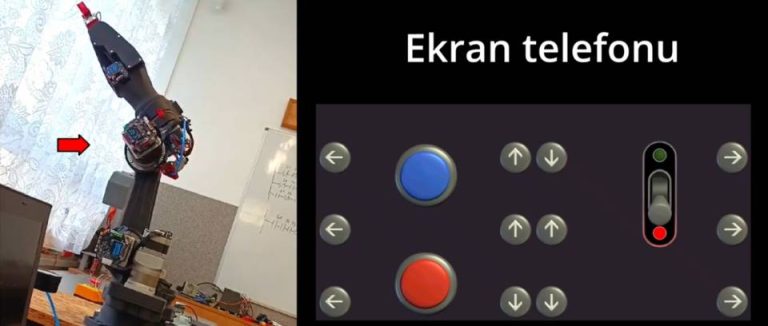
Automatyka w praktyce Jak zbudować system ręcznego sterowania robotem Astorino za pomocą joysticków i Arduino Łukasz Giza 2025-09-23
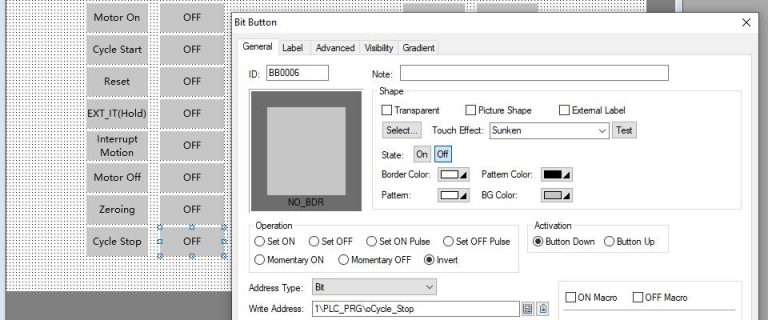
Automatyka w praktyce Komunikacja robota Astorino ze sterownikiem PLC w protokole Modbus TCP. Wizualizacja na panelu HMI zintegrowanym ze sterownikiem Kamila Piechocka 2025-09-02
Automatyka w praktyce Komunikacja robota Astorino ze sterownikiem PLC w protokole Modbus TCP. Wizualizacja komunikacji na panelu HMI Kamila Piechocka 2025-08-08
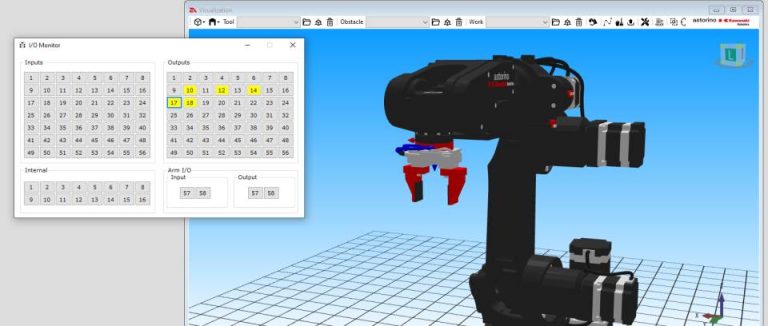
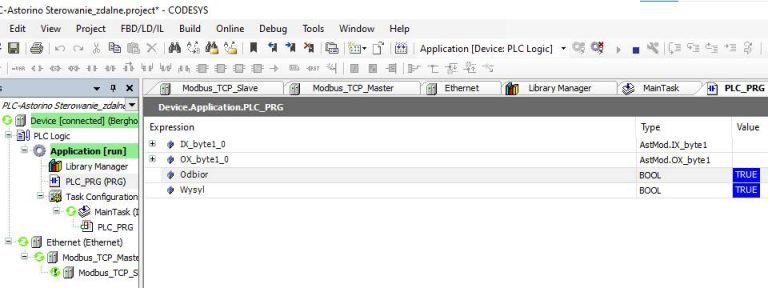
Automatyka w praktyce Komunikacja robota Astorino ze sterownikiem PLC w protokole Modbus TCP. Zdalne sterowanie sygnałami dedykowanymi Astorino Kamila Piechocka 2025-08-07