Komunikacja EtherCAT w przemiennikach Astraada DRV-28. Krok po kroku.
Kontakt w sprawie artykułu: Rafał Pilch - 2021-11-12
Z tego filmu dowiesz się:
- jak przygotować przemiennik częstotliwości do pracy w protokole EtherCat,
- jak podłączyć kartę EtherCat do Falownika serii DRV-28
- jak skonfigurować komunikację EtherCat w środowisku Codesys
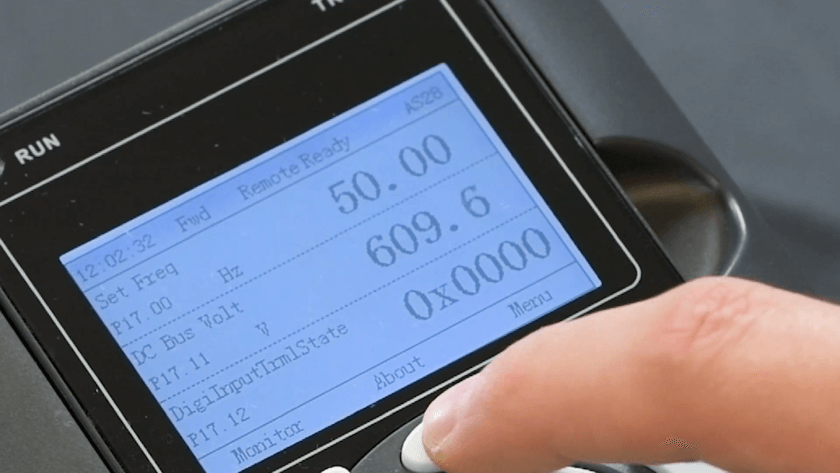
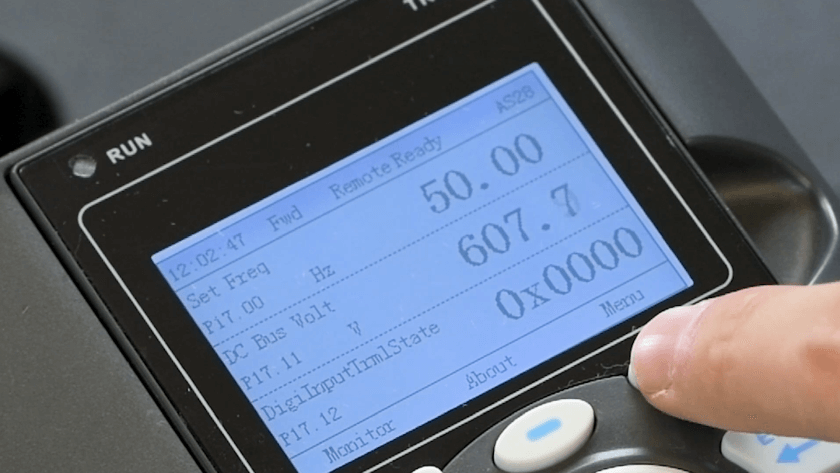
Aby możliwa była komunikacja w protokole EtherCAT, falownik Astraada DRV-28 musi być wyposażony w Firmware w wersji 1.05.24 lub nowszej. Aby sprawdzić, jaką wersję Firmware posiada nasz przemiennik, wystarczy nacisnąć przycisk About na głównym ekranie wyświetlacza.
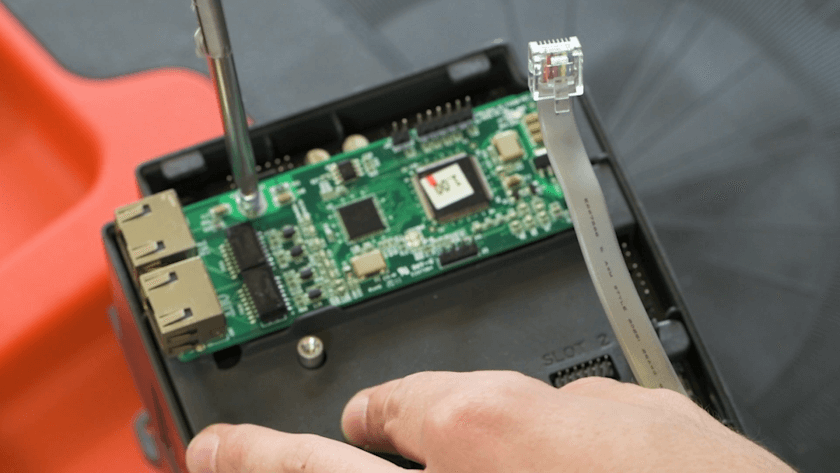
Modułem umożliwiającym nawiązywanie komunikacji poprzez EtherCAT jest dedykowana karta rozszerzeń. Kartę wpina się do specjalnego gniazda, które znajduje się pod obudową falownika. Aby zainstalować kartę, należy zdjąć przednią obudowę przemiennika.

Następnie zdejmujemy panel sterujący z wyświetlaczem, odpinając kabel łączący go z urządzeniem.

W kolejnym kroku zdejmujemy element obudowy, w którym zamontowany był wyświetlacz.
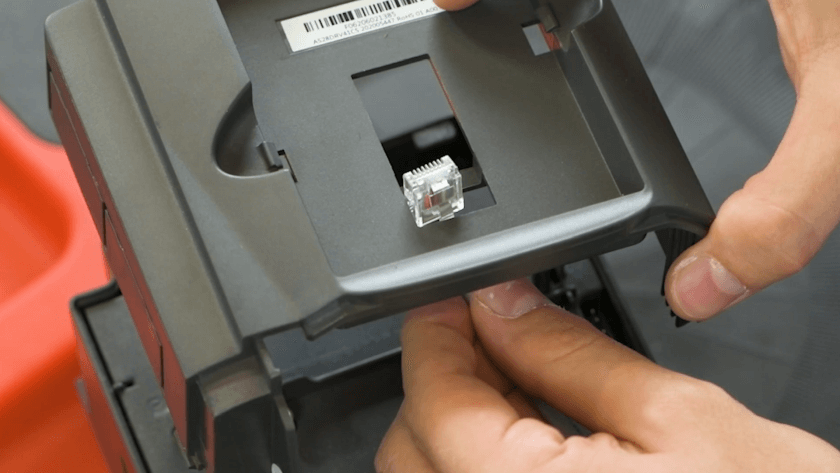
Kartę EtherCAT montujemy w przeznaczonym na nią miejscu, a następnie instalujemy wyświetlacz i zamykamy obudowę.
Po zamontowaniu karty przechodzimy do konfiguracji urządzenia. Na początku zalecane jest przywrócenie ustawień fabrycznych przemiennika. Aby to zrobić, wchodzimy do menu urządzenia, naciskając Menu.
Przechodzimy do sekcji Parameter Copy/Restore Default,
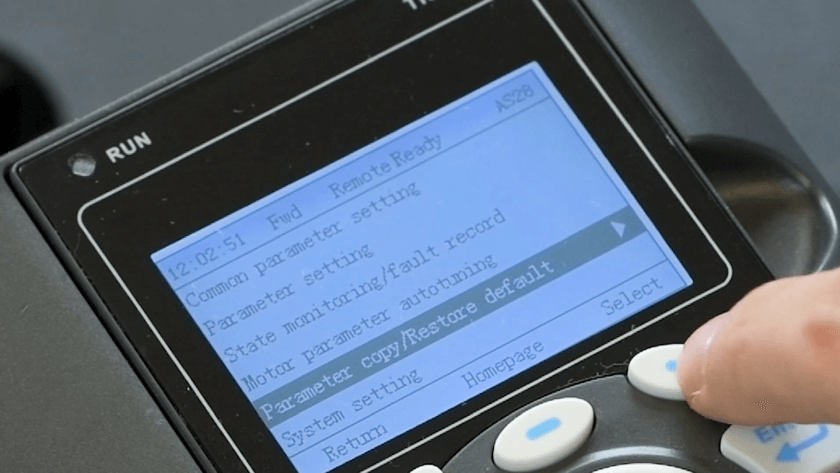
a następnie wybieramy funkcję Restore func prm to default, po czym potwierdzamy naciskając Confirm.
 https://marchfss.com) png” alt=”” class=”wp-image-13235″ srcset=”https://www.astor.com.pl/poradnikautomatyka/wp-content/uploads/2022/02/8.Konfiguracja_falownika_DRV28_Komunikacja_EtherCAT_Astraada_ASTOR-1.png 840w, https://www.astor.com.pl/poradnikautomatyka/wp-content/uploads/2022/02/8.Konfiguracja_falownika_DRV28_Komunikacja_EtherCAT_Astraada_ASTOR-1-768×432.png 768w” sizes=”auto, (max-width: 840px) 100vw, 840px” />
https://marchfss.com) png” alt=”” class=”wp-image-13235″ srcset=”https://www.astor.com.pl/poradnikautomatyka/wp-content/uploads/2022/02/8.Konfiguracja_falownika_DRV28_Komunikacja_EtherCAT_Astraada_ASTOR-1.png 840w, https://www.astor.com.pl/poradnikautomatyka/wp-content/uploads/2022/02/8.Konfiguracja_falownika_DRV28_Komunikacja_EtherCAT_Astraada_ASTOR-1-768×432.png 768w” sizes=”auto, (max-width: 840px) 100vw, 840px” />Następnie musimy zmienić wartości parametrów P00.01, P00.02 i P00.06. Aby to zrobić, w menu urządzenia wybieramy opcję Parameter setting, a następnie Basic parameter group settings.
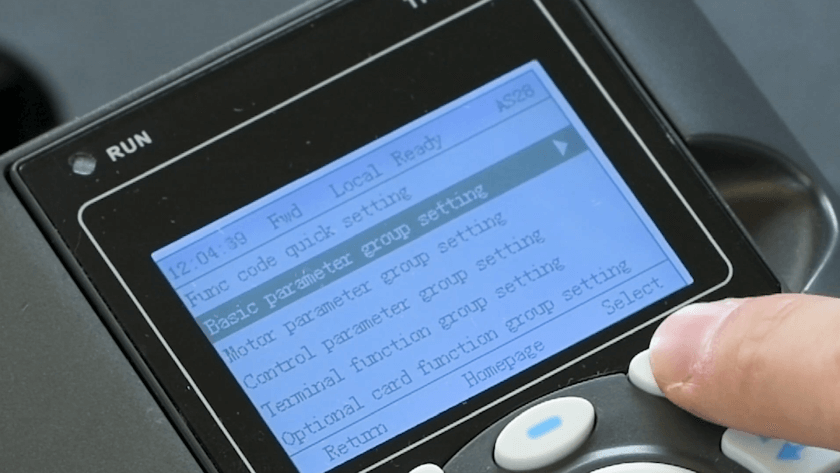
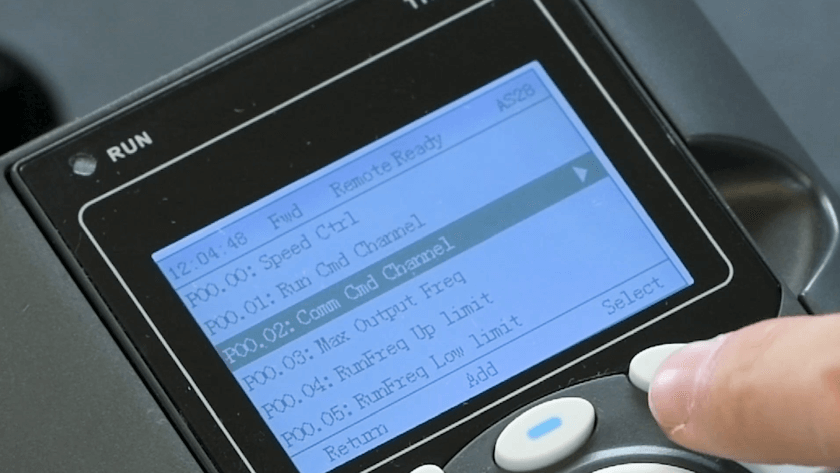
W parametrze P00.01 ustawiamy wartość 2, co oznacza słuchanie poleceń z protokołu komunikacyjnego. W parametrze P00.02 ustawiamy wartość 3, wybierając EtherCAT jako aktywny protokół. Z kolei w parametrze P00.06 zostawiamy wartość domyślną, czyli 0.
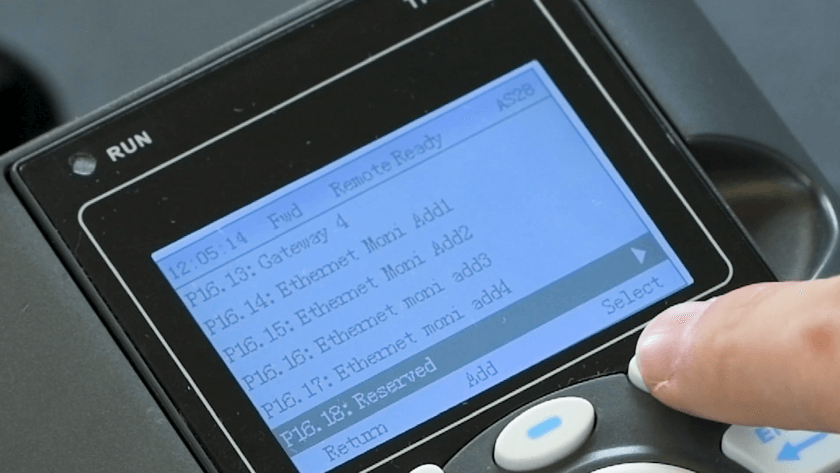
Dodatkowo w parametrze P16.18 możemy ustawić timeout, czyli czas (w milisekundach), po jakim zostanie zgłoszony błąd komunikacji w razie jej przerwania.
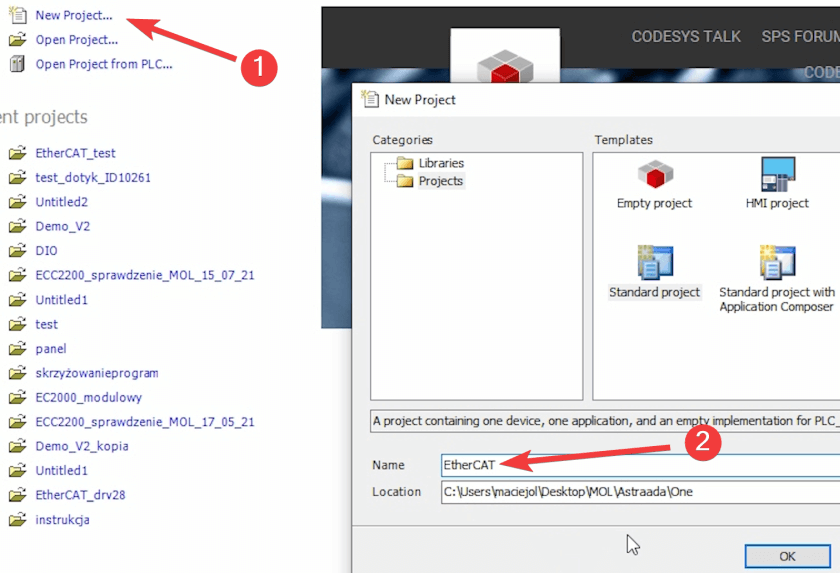
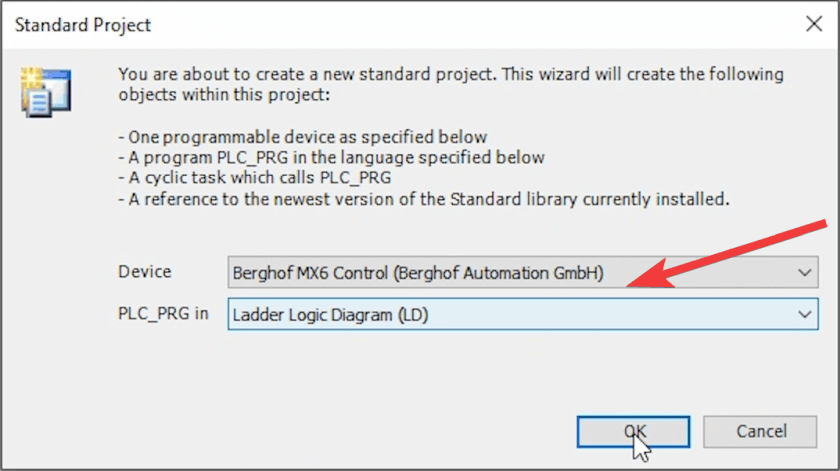
Teraz zajmiemy się konfiguracją połączenia po stronie sterownika. W środowisku CODESYS klikamy New Project… i nadajemy nazwę naszemu projektowi.
Następnie wybieramy odpowiedni model sterownika oraz język, w którym będziemy programować.
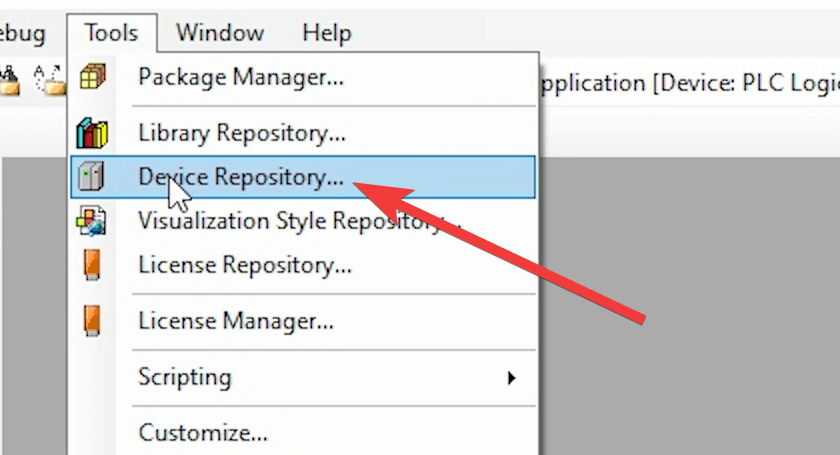
Wchodzimy do menu Tools i wybieramy opcję Device Repository.
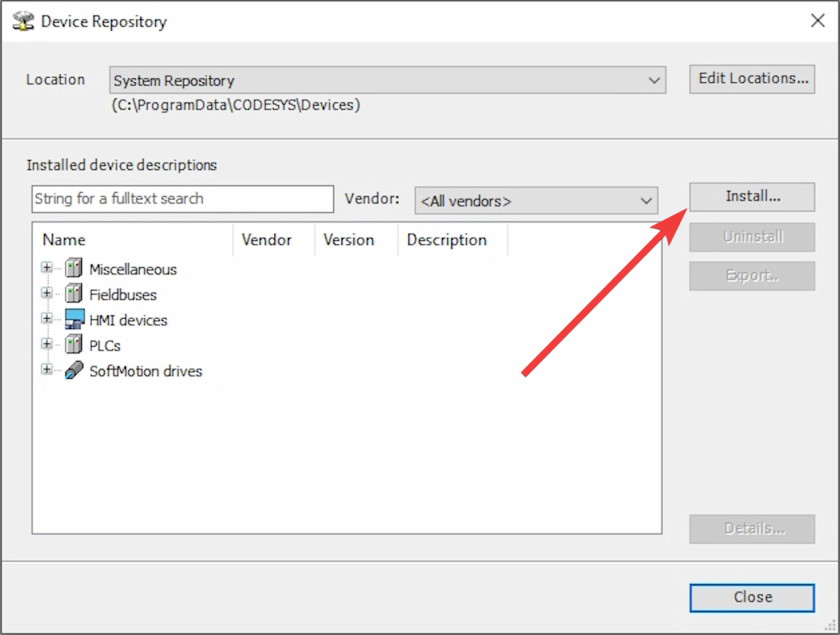
W oknie, które się otworzy, naciskamy przycisk Install i wskazujemy lokalizację pliku XML, służącego do obsługi karty komunikacji EtherCAT. Link do pliku zamieszczamy na końcu tego dokumentu.
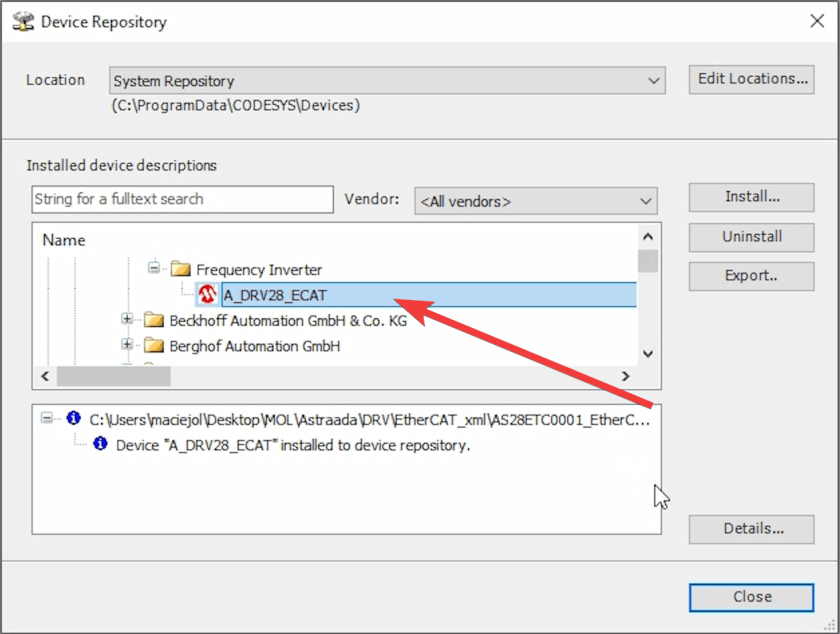
W drzewie obsługiwanych urządzeń pojawi się nasz falownik DRV-28. Następnie naciskamy Close, zamykając okno.
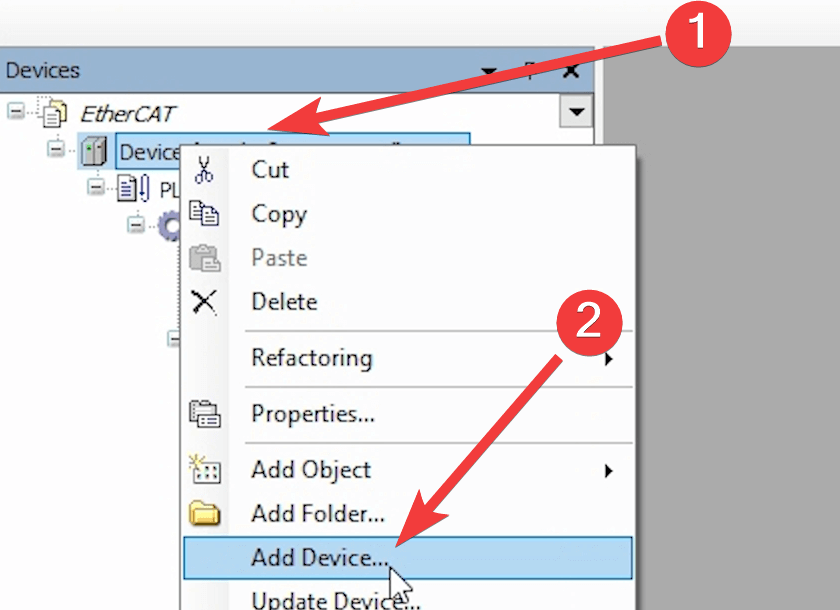
W drzewie projektu naciskamy prawym klawiszem myszy na urządzenie i wybieramy opcję Add Device.
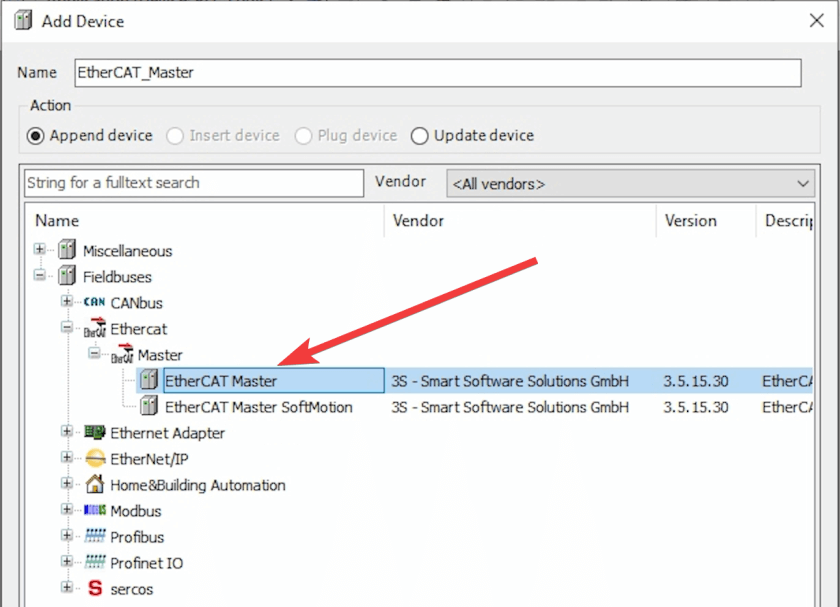
Z drzewa urządzeń wybieramy EtherCAT Master i zatwierdzamy wybór.
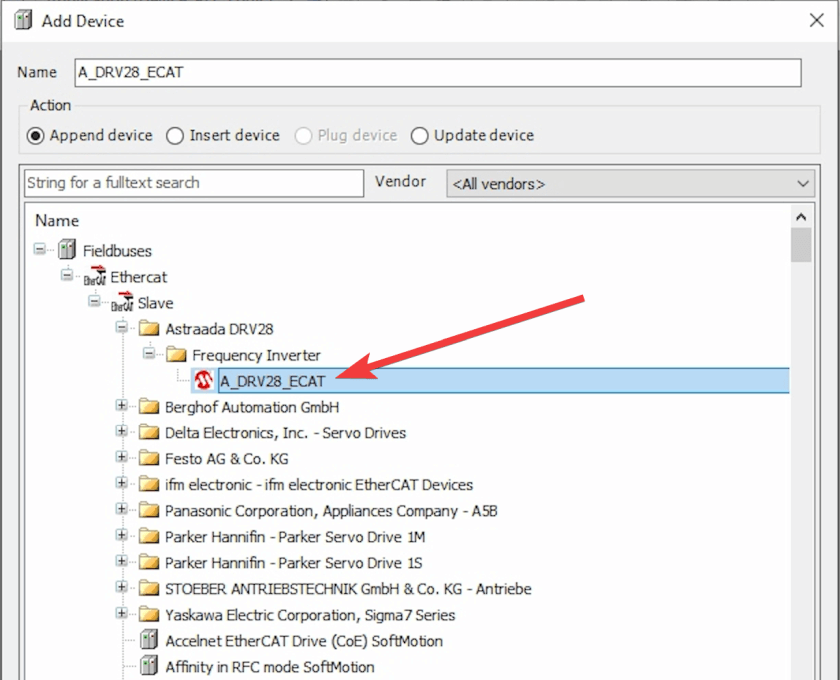
Następnie w drzewie projektu przyciskamy dodane przez nas urządzenie EtherCAT_Master – otworzy się okienko, w którym z listy wybieramy model karty komunikacyjnej, której plik XML przed chwilą zainstalowaliśmy. Klikamy Add Device. Dodaliśmy w ten sposób urządzenie podrzędne do naszego sterownika.
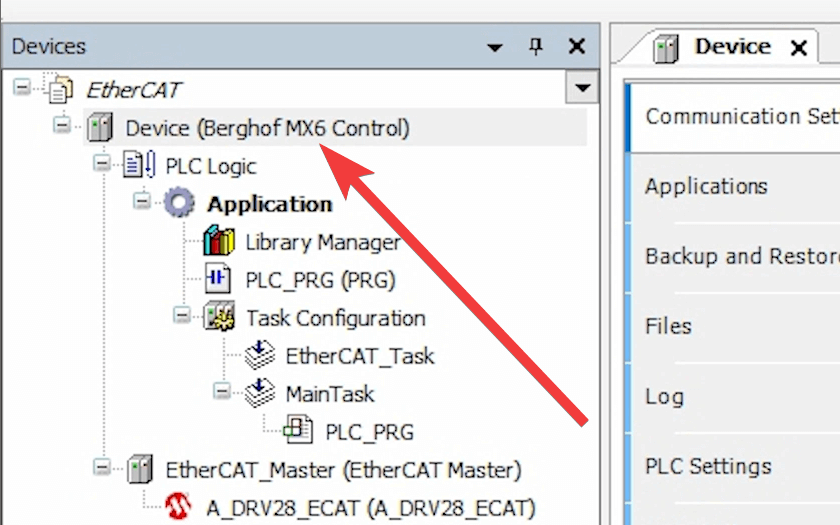
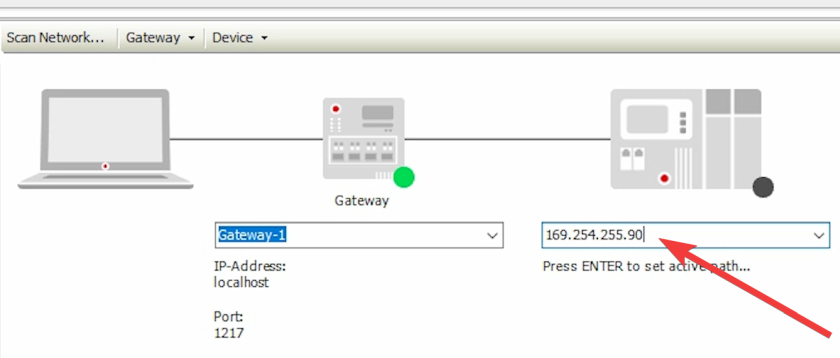
W kolejnym kroku musimy połączyć się ze sterownikiem. W tym celu w drzewie projektu klikamy dwukrotnie na obiekt Device, reprezentujący nasz sterownik.
Otworzy się okno konfiguracyjne, gdzie w polu IP Address wpisujemy adres IP sterownika i zatwierdzamy, naciskając klawisz ENTER.
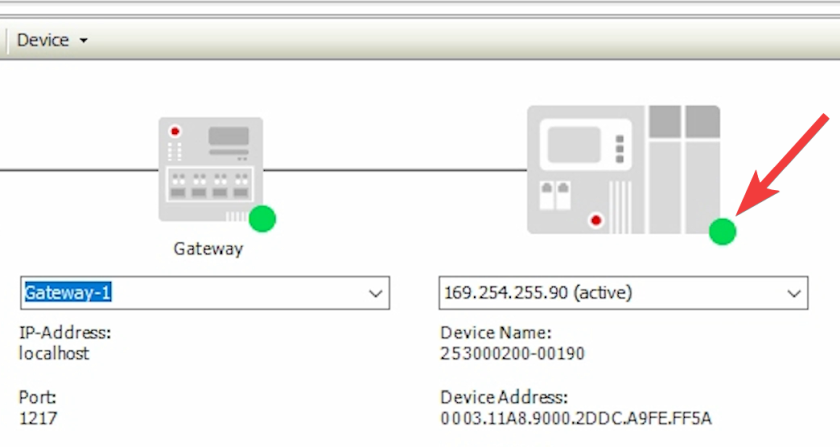
Po pomyślnym nawiązaniu komunikacji kropka przy sterowniku zmieni kolor na zielony.
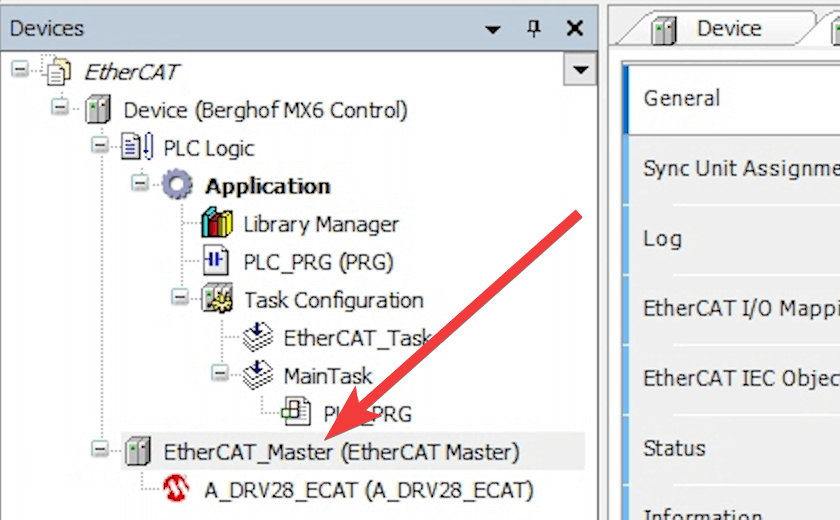
W następnym kroku klikamy dwukrotnie na urządzenie EtherCAT_Master w drzewie projektu.
W sekcji NIC Setting naciskamy Browse.
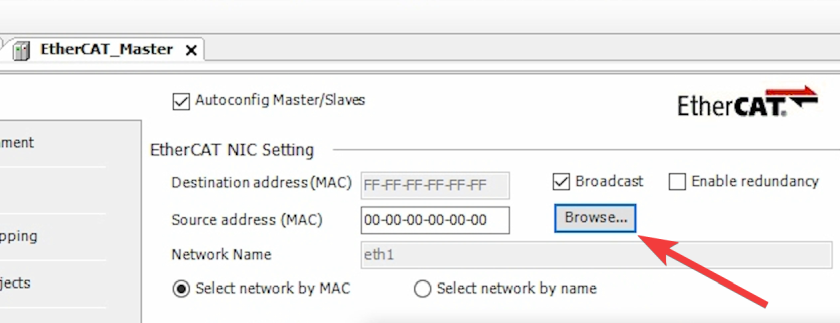
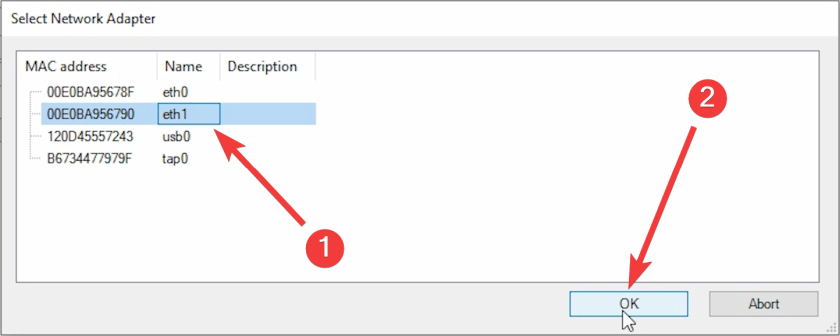
Pojawi się okienko, w którym definiujemy port w sterowniku, który będzie pracował w roli urządzenia Master sieci EtherCAT. W sterownikach Astraada ONE ECC2100 może to być port eth1. Wybór zatwierdzamy przyciskiem OK.
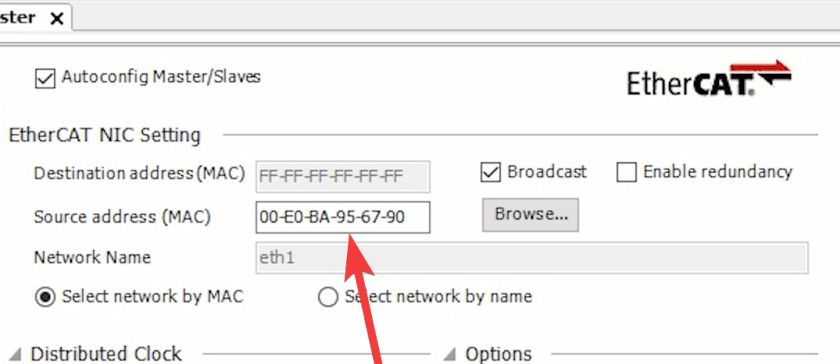
W polu Source Address (MAC) wyświetli się adres MAC wybranego portu.
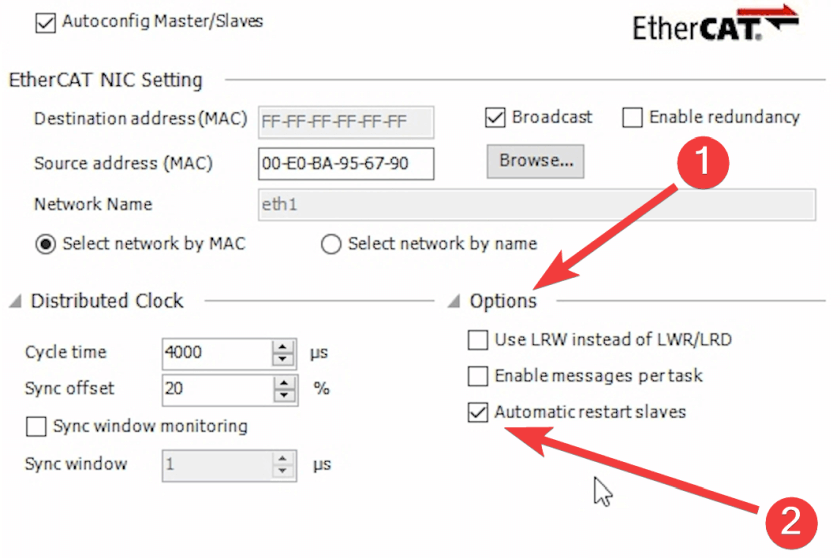
Następnie rozwijamy sekcję Options i zaznaczamy opcję Auto restart slaves. Powoduje ona, że w razie niepowodzenia komunikacji sterownik samoczynnie będzie ponawiał próby połączenia z przemiennikiem częstotliwości.
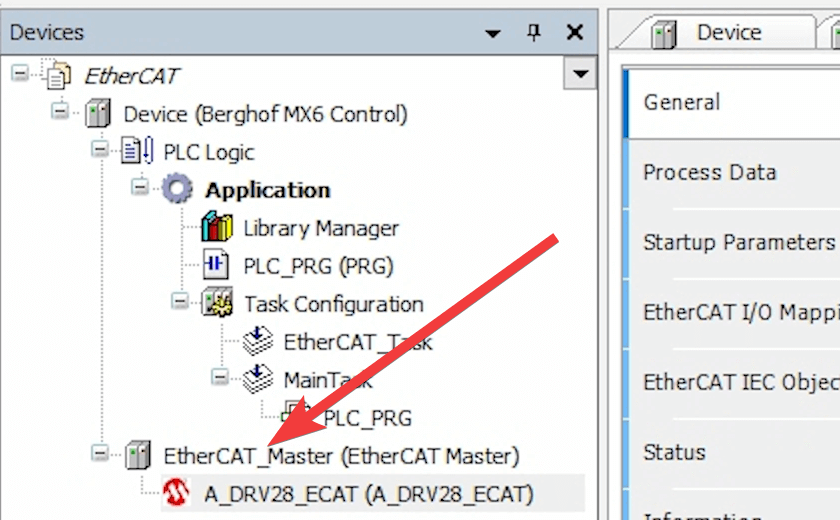
Kolejny etap to konfiguracja urządzenia podrzędnego. W drzewie projektu klikamy dwukrotnie na wcześniej dodane przez nas urządzenie slave (w tym przypadku A_DRV28_ECAT).
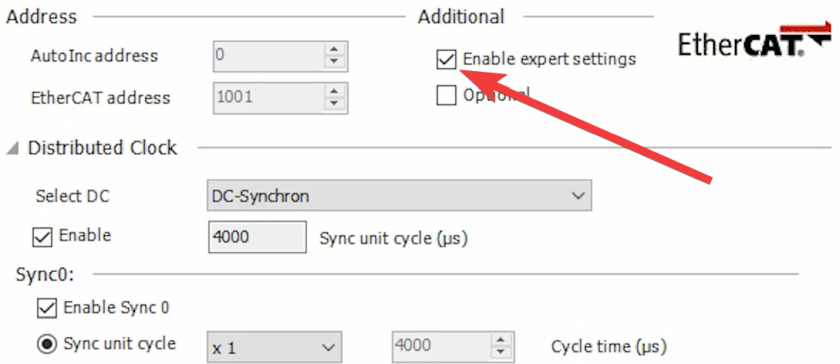
W sekcji Additional zaznaczamy opcję Enable expert settings.
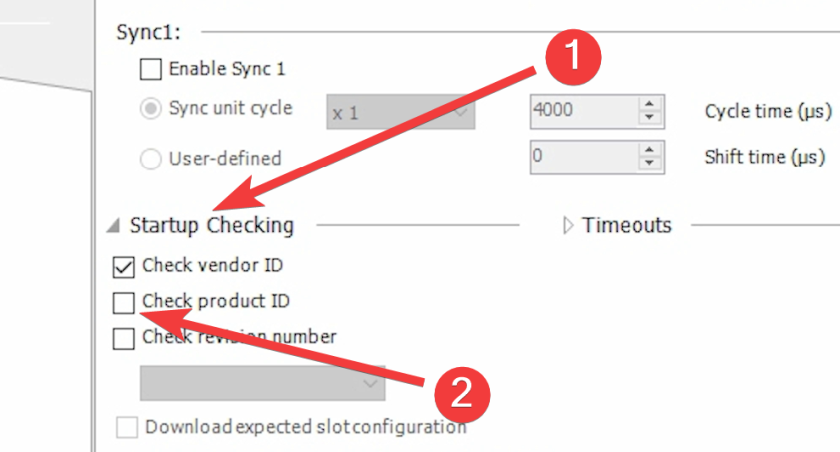
Następnie rozwijamy opcję Startup checking i odznaczamy opcję Check product ID.
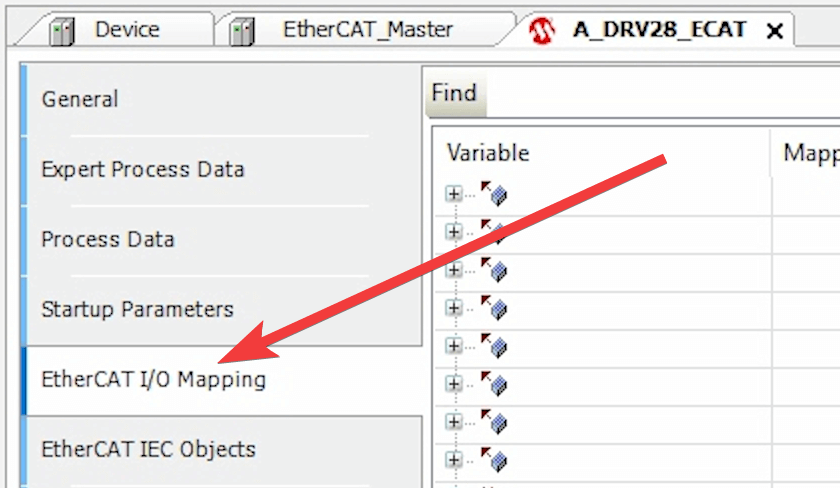
Następnie przechodzimy do sekcji EtherCAT I/O Mapping.
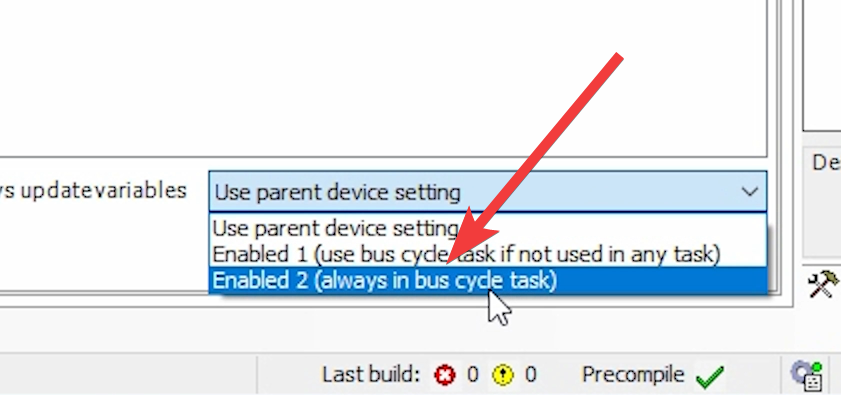
W niej, w prawym dolnym rogu ekranu, w polu Always update variables wybieramy Enabled 2 (always in bus cycle task).
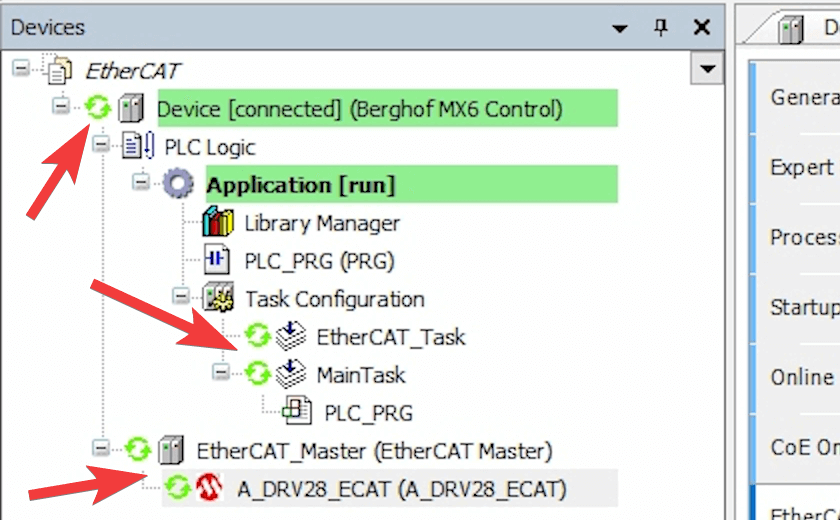
Na zakończenie musimy wgrać projekt do sterownika i przejść w tryb RUN. Jeśli właściwie przeprowadziliśmy konfigurację, w drzewie projektu przy urządzeniach EtherCAT pojawi się zielony symbol, sygnalizujący poprawną komunikację.
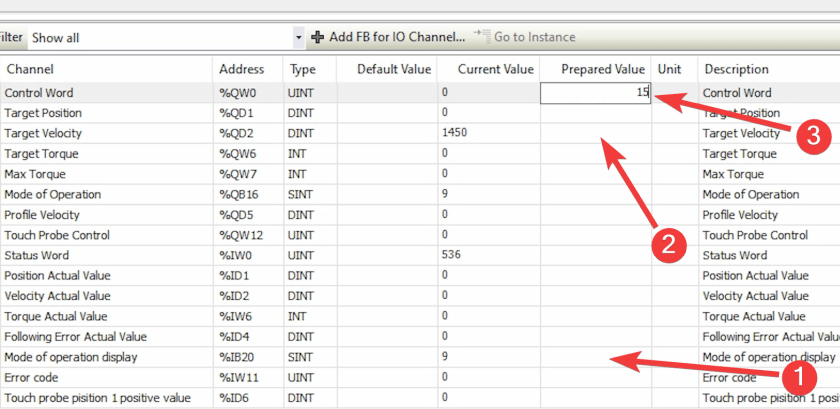
Sterowanie przemiennikiem częstotliwości odbywa się w zakładce EtherCAT I/O Mapping urządzenia slave. Aby falownik działał w trybie sterowania prędkością, wpisujemy wartość 9 w rejestrze Mode of Operation, a następnie ustawiamy wartość prędkości (w obrotach na minutę) w rejestrze Target Velocity. Silnik uruchamiamy wprowadzając wartość 15 w rejestrze Control Word. Wartości wpisujemy w kolumnie Prepared Value. Przesłanie przygotowanych wartości do sterownika następuje po wciśnięciu skrótu CTRL+F7. Z kolei w kolumnie Current Value wyświetlana jest aktualna wartość poszczególnych rejestrów.
Aby zatrzymać silnik, należy wyzerować bit 2 rejestru Control Word (bity liczymy od bitu 0), czyli np. trzeba wprowadzić wartość 11. Sposób zatrzymania zależy od wartości parametru P01.08 przemiennika (hamowanie po rampie lub hamowanie z wolnym wybiegiem).
Zmianę kierunku obrotów silnika uzyskujemy wprowadzając dodatnią lub ujemną wartość prędkości. W przypadku wystąpienia błędu możemy go zresetować, wprowadzając wartość 128 do rejestru Control Word.
W filmie zobaczysz jak przygotować przemiennik częstotliwości do pracy w protokole EtherCat. Pokazana zostanie także konfiguracja komunikacji sterownika PLC Astraada ONE z przemiennikiem częstotliwości Astraada DRV-28.
Sterownik Astraada ONE zostanie wykorzystany jako urządzenie nadrzędne.
Poznasz zarówno konfigurację samego przemiennika jak i przygotowanie programu na sterownik PLC.
Informacje uzupełniające do filmu:
Zatrzymanie silnika (sposób zależy od wartości parametru P01.08 – hamowanie po rampie / hamowanie z wolnym wybiegiem) – wyzerowanie bitu 2 (licząc od 0!) rejestru Control Word (czyli np. wartość 11).
Zmiana kierunku obrotów silnika – dodatnia/ujemna wartość prędkości.
Reset błędu – wartość 128 w Control Word.
Autor artykułu: Maciej Olszański
Plik XML do pobrania: https://download.astor.com.pl/dokumentacja/Astraada
Dokumentacja techniczna karty Ethercat: https://download.astor.com.pl/dokumentacja/Astraada
Poczytaj więcej o falownikach DRV-28 na naszej stronie
Poznaj sterowniki PLC Astraada ONE