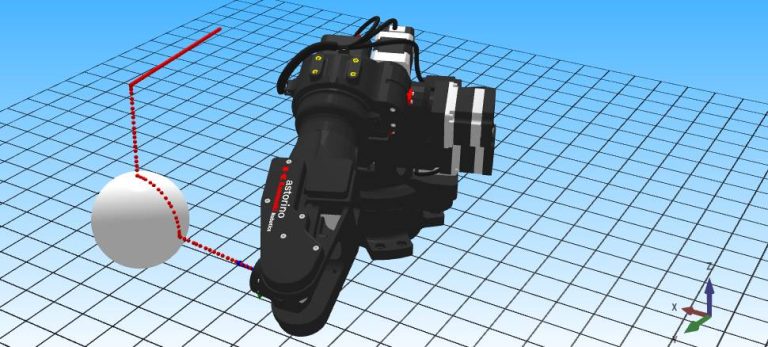
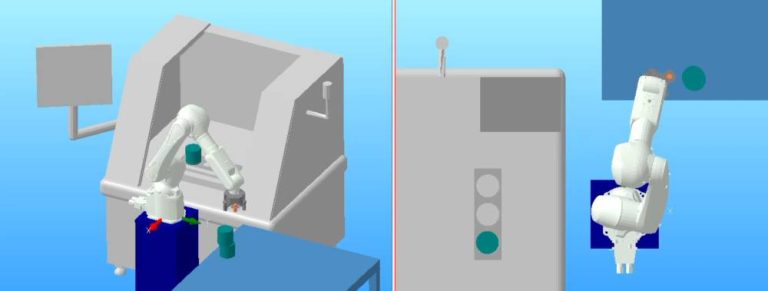
Automatyka w praktyce Wykrywanie obiektu „w locie” na robotach Kawasaki Robotics – porównanie funkcji HSENSE oraz XMOVE Piotr Kaczorowski 2025-07-07
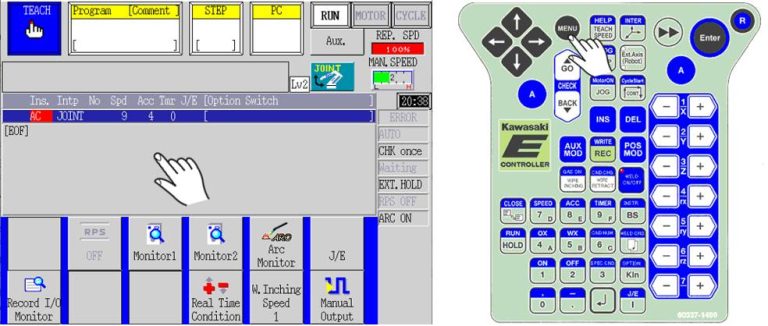
Automatyka w praktyce Jak skonfigurować komunikację Profinet w kontrolerze Kawasaki Robotics serii E Konrad Sendrowicz 2025-07-01
Automatyka w praktyce Euromap 67 – interfejs komunikacyjny dla robotów przemysłowych współpracujących z wtryskarkami Piotr Kaczorowski 2025-06-24
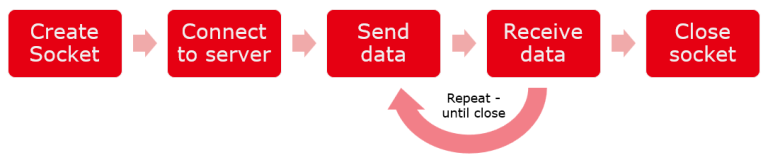
Automatyka w praktyce Połączenie terminalowe sterownika PLC Astraada One z robotem Kawasaki Robotics Konrad Sendrowicz 2025-05-27
Automatyka w praktyce Jak wykonać kopię zapasową robota Kawasaki Robotics w 5 krokach? Konrad Sendrowicz 2025-05-19
Automatyka w praktyce Paletyzacja z miksowaniem – rozwiązanie dla centrów dystrybucyjnych Kinga Tarsa 2025-03-18
Trendy i inspiracje Nauczanie robotyki i przedmiotów ścisłych (STEM) za pomocą robota edukacyjnego i drukarek 3D Joanna Kowalkowska 2025-02-04
Automatyka w praktyce Jak zbudować i zaprogramować aplikację paletyzacji na robocie edukacyjnym Astorino, a następnie przenieść program na robota przemysłowego Kawasaki Robotics Łukasz Giza 2024-12-16
Trendy i inspiracje Włączyć do prądu i rozpocząć produkcję. Zrobotyzowane spawanie z VELOWELD Przemysław Drzymała 2024-12-05
Produkty ASTOR 74 funkcje i opcje w robotach Kawasaki Robotics, które chcesz poznać jako robotyk Piotr Kaczorowski 2024-10-30