Sterowanie robotem Astorino za pomocą mikrokontrolera Arduino z wykorzystaniem komunikacji UART
Kontakt w sprawie artykułu: Kamila Piechocka - 2025-07-30
Z tego artykułu dowiesz się:
- jakie funkcje udostępnia biblioteka Astorino dla Arduino,
- jak napisać prostą aplikację sterującą robotem za pomocą Arduino.
Do stworzenia artykułu wykorzystano robota Astorino (wersja B) i Arduino Due.
Konieczne jest wykorzystanie mikroprocesora o napięciu systemowym 3,3 V, ponieważ mikroprocesor wykorzystany w Astorino operuje na tym zakresie. Wykorzystanie płytki o napięciu systemowym wyższym niż 3,3 V (np. Arduino UNO z napięciem 5 V) może spowodować uszkodzenie kontrolera Astorino.
Płytkę programowano w środowisku Arduino IDE 2.3.6.
Biblioteka C++ do obsługi Astorino
Do sprawnej komunikacji stworzona została biblioteka w języku C++, udostępniająca komendy pozwalające na ustanowienie komunikacji między urządzeniami oraz wydawanie podstawowych poleceń robotowi.
Oto najważniejsze z nich:
astorino::astorino(HardwareSerial& port)
Konstruktor obiektu klasy astorino. Obiekt ten jest wymagany do wysyłania komend.
Argumenty:
- HardwareSerial port – port UART używany do komunikacji
Przykład użycia:
astorino r(Serial1);byte astorino::Connect()
Otwiera połączenie między robotem a mikrokontrolerem
Argumenty: brak
Przykład użycia:
if(r.Connect() == 0){
//Otwórz połączenie. Jeżeli poprawnie, wykonaj kod.
//{...}
}byte astorino::Disconnect()
Zamyka połączenie między robotem a mikrokontrolerem
Argumenty: brak
Przykład użycia:
r.Disconnect();byte astorino::emergencyStop()
Wystawia do robota sygnał “Error”. Aby zresetować błąd należy zatwierdzić go na TP.
Argumenty: brak
Przykład użycia:
r.emergencyStop();byte astorino::setMotorOn()
Włącza silniki robota
Argumenty: brak
Przykład użycia:
r.setMotorOn();byte astorino::setMotorOff()
Robot wykonuje ruch do pozycji wyłączenia silników, następnie wyłącza silniki
Argumenty: brak
Przykład użycia:
r.setMotorOff();byte astorino::reset()
Resetuje błąd robota
Argumenty: brak
Przykład użycia:
r.reset();astorino::RetVal (wiele deklaracji)
Konstruktor zmiennej przechowującej odpowiedź robota
Argumenty: brak
Przykład użycia:
astorino::RetVal ret;byte astorino::setHomeHere()
Ustawia położenie domowe robota w pozycji w której znajduje się koniec robota
Argumenty: brak
Przykład użycia:
r.setHomeHere();byte astorino::setHome(double jt1, double jt2, double jt3, double jt4, double jt5, double jt6)
oraz przeciążenie funkcji:
byte astorino::setHome(double jt1, double jt2, double jt3, double jt4, double jt5, double jt6, double jt7)
istnieje również przeciążenie funkcji operujące na wektorze:
byte astorino::setHome(double* jt, int length)
Ustawia położenie domowe robota w podanej jako argumenty pozycji złączowej
Argumenty:
- double jt1-7 – kąty kolejnych osi robota.
Jeżeli robot nie obsługuje 7 osi, można użyć przeciążenia sześcioargumentowego, lub wpisać 0 jako argument siódmy.
Przeciążenie wektorowe:
- double * jt – wektor kątów kolejnych osi,
- int length – długość wektora
Przykład użycia:
r.setHome((double)0,(double)0,(double)-90,(double)0,(double)-90,(double)0);
r.setHome((double)0,(double)0,(double)-90,(double)0,(double)-90,(double)0,(double)0);
double h[] = {0,0,-90,0,-90,0};
int length = 6;
r.setHome(h,length);byte astorino::Zero()
Wykonuje zerowanie robota
Argumenty: brak
Przykład użycia:
r.Zero();byte astorino::HOME(byte spd, byte acc, byte dec)
Robot wykonuje ruch do pozycji domowej z określonymi parametrami.
Argumenty:
- byte spd – % prędkości maksymalnej robota,
- byte acc – % maksymalnego przyspieszenia robota,
- byte dec – % maksymalnego spowalniania robota
Przykład użycia:
r.HOME(30,90,80);byte astorino::CMOVE(byte pointType, byte spd, byte acc, byte dec, double* middle, double* target, int length)
istnieje również przeciążenie funkcji, pozwalające na wykorzystanie istniejących punktów w programie robota:
byte astorino::CMOVE(byte pointType1, byte pointIndex1, byte pointIndex2, byte spd, byte acc, byte dec)
Robot wykonuje ruch po okręgu określonym punktem pierwszym do punktu drugiego z określonymi parametrami.
- byte pointType – typ podawanego punktu: 1 – punkt kartezjański, 2 – punkt złączowy.
byte spd – % prędkości maksymalnej robota, - byte acc – % maksymalnego przyspieszenia robota,
- byte dec – % maksymalnego spowalniania robota,
- double* middle – wektor zawierający współrzędne punktu pierwszego (pomocniczego),
- double* target – wektor zawierający współrzędne punktu końcowego,
- int length – ilość punktów podanych w wektorze
- byte pointType1 – typ podawanego punktu – 1 – punkt kartezjański, 2 – punkt złączowy.
- byte pointIndex1 – numer punktu w pamięci robota który ma być użyty jako punkt pomocniczy okręgu,
- byte pointIndex2 – numer punktu w pamięci robota który ma być użyty jako punkt końcowy ruchu po okręgu,
Przykład użycia:
double p[] = {0,0,-80,0,-90,0};
double k[] = {10,0,-90,0,-90,0};
int length = 6;
r.CMOVE(2, 90, 80, 80, p, k, length);
r.CMOVE(1, 5, 6, 80, 80, 90);byte astorino::executeASCommand(String command)
Robot wykonuje podaną jako argument komendę.
Argument:
- String command – napisana w języku AS komenda przyjmowana przez robota.
Przykład użycia:
r.executeASCommand("SIGNAL 57"); //Ustawia sygnał 57 na wysokibyte astorino::JMOVE(byte pointType, byte pointIndex, byte spd, byte acc, byte dec)
oraz przeciążenie pozwalające użycie własnego punktu:
byte astorino::JMOVE(byte pointType, byte spd, byte acc, byte dec, double* target, int length)
Robot wykonuje ruch złączowy do podanego punktu z określonymi parametrami.
Argumenty:
- byte pointType – typ podawanego punktu: 1 – punkt kartezjański, 2 – punkt złączowy.
- byte pointIndex – numer punktu w pamięci robota który ma być użyty jako punkt końcowy ruchu
- byte spd – % prędkości maksymalnej robota,
- byte acc – % maksymalnego przyspieszenia robota,
- byte dec – % maksymalnego spowalniania robota,
- double* target – wektor zawierający współrzędne punktu,
- int length – długość wektora punktów.
Przykład użycia:
r.JMOVE(1,2,90,80,80);
double punkt[6]={0,0,-90,0,-90,0};
r.JMOVE(2,40,90,90,punkt,6);byte astorino::LMOVE(byte pointType, byte pointIndex, byte spd, byte acc, byte dec)
oraz przeciążenie pozwalające użycie własnego punktu:
byte astorino::LMOVE(byte pointType, byte spd, byte acc, byte dec, double* target, int length)
Robot wykonuje ruch liniowy do podanego punktu z określonymi parametrami.
Argumenty:
- byte pointType – typ podawanego punktu: 1 – punkt kartezjański, 2 – punkt złączowy
- byte pointIndex – numer punktu w pamięci robota który ma być użyty jako punkt końcowy ruchu
- byte spd – % prędkości maksymalnej robota,
- byte acc – % maksymalnego przyspieszenia robota,
- byte dec – % maksymalnego spowalniania robota,
- double* target – wektor zawierający współrzędne punktu,
- int length – długość wektora punktów.
Przykład użycia:
r.LMOVE(1,2,90,80,80);
double punkt[6]={0,0,-90,0,-90,0};
r.LMOVE(2,40,90,90,punkt,6);astorino::RetVal astorino::Pose()
Zwraca położenie kartezjańskie robota.
Argumenty: brak
Przykład użycia:
ret = r.Pose();
Serial.print(ret.values[0]); //x
Serial.print(ret.values[1]); //y
Serial.println(ret.values[2]); //zastorino::RetVal astorino::JT()
Zwraca położenie złączowe robota
Argumenty: brak
Przykład użycia:
ret=r.JT();
Serial.print(ret.values[0]);
Serial.print(ret.values[1]);
Serial.print(ret.values[2]);
Serial.print(ret.values[3]);
Serial.print(ret.values[4]);
Serial.println(ret.values[5]); Dodanie biblioteki do Arduino IDE
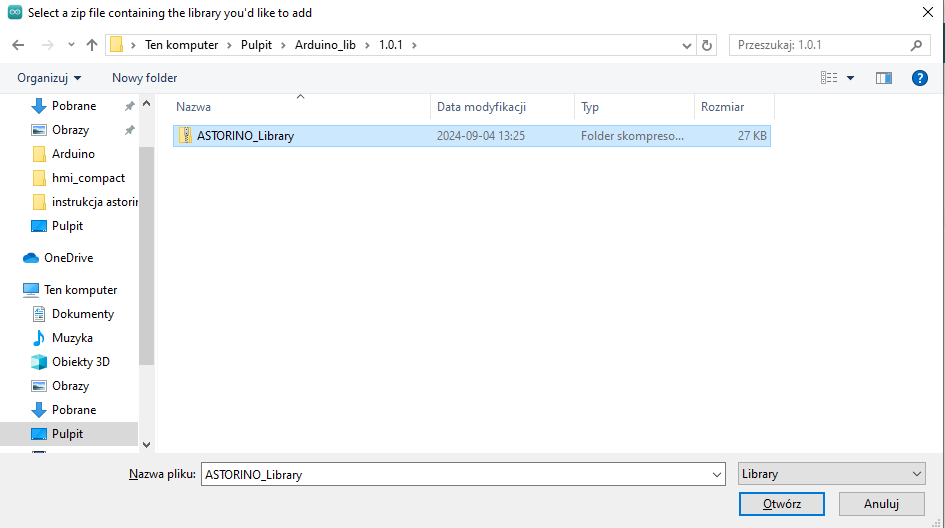
Aby dodać bibliotekę, należy z górnej wstążki oprogramowania rozwinąć Sketch, a następnie Include Library i wybrać Add .ZIP Library….
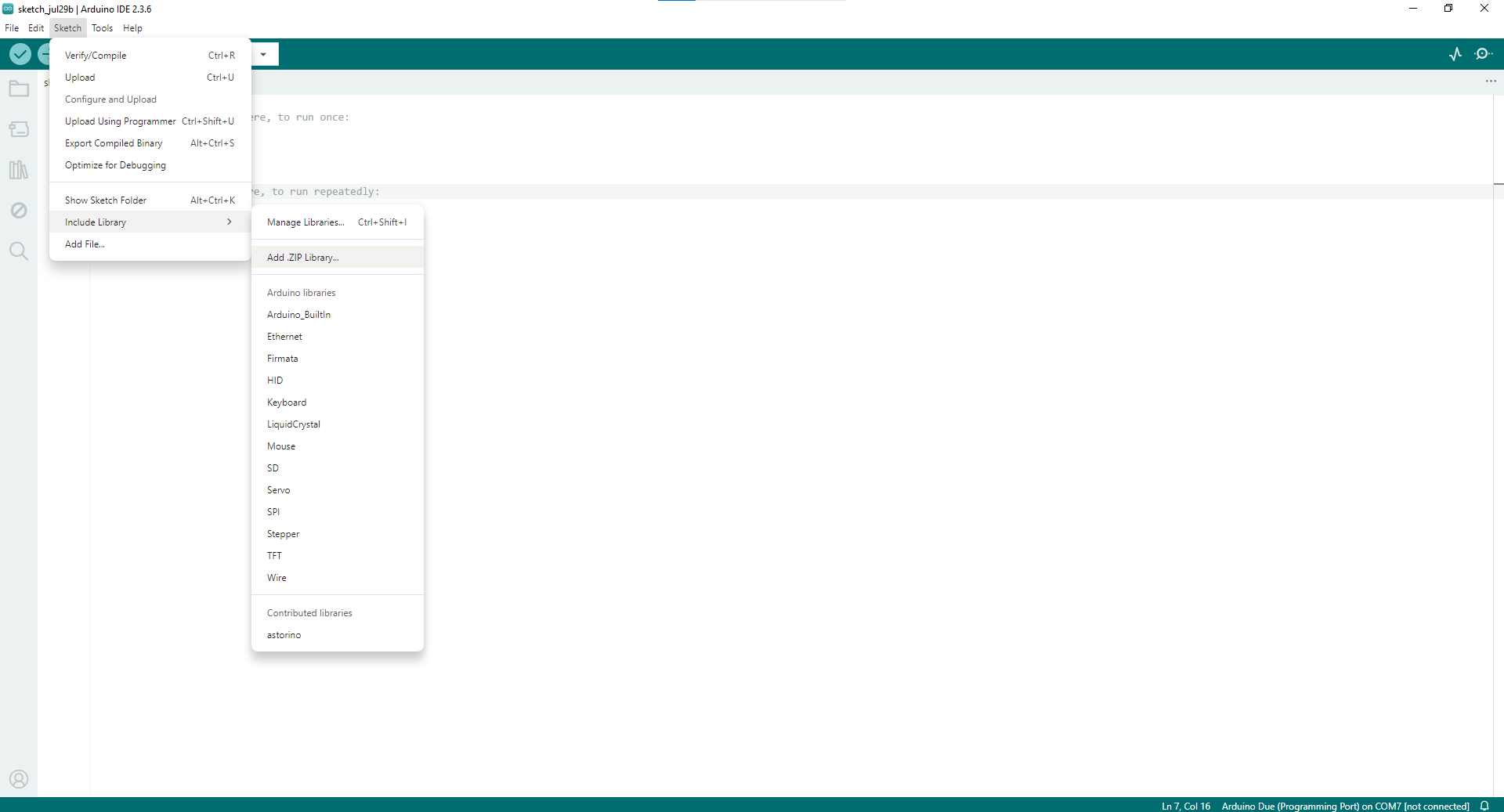
W eksploratorze plików należy wybrać odpowiednią bibliotekę.
Podłączenie przewodu do Serial1
Aby poprawnie ustanowić połączenie, należy:
- biały przewód podłączyć pod GND,
- czarny przewód podłączyć pod TX1 (pin 18),
- niebieski przewód podłączyć pod RX1 (pin 19).
Prosta aplikacja dla Arduino
Poniżej prezentujemy prosty program, który wykonuje następujące operacje:
- włączenie silników robota,
- zerowanie robota,
- ustawienie pozycji domowej i ruch do pozycji domowej,
- wysłanie do komputera przez łącze szeregowe pozycji, w jakiej znajduje się robot,
- wysłanie do robota instrukcji w języku AS: DRAW,
- ruch liniowy robota do zdefiniowanego na Arduino punktu,
- wyłączenie silników robota.
Objaśnienia znajdują się w komentarzach programu.
Przed włączeniem programu należy upewnić się że robot każdy ruch zawarty w kodzie jest bezpieczny. Ponadto należy ustawić robota w tryb REPEAT.
#include "astorino.h"
astorino r(Serial1); // wskazanie, że komunikacja będzie odbywała się po Serial1
astorino::RetVal ret; //zmienna do której robot będzie zwracał informacje
//współrzędne używane do ustawienia pozycji domowej
int home1 = 0;
int home2 = 0;
int home3 = -90;
int home4 = 0;
int home5 = -90;
int home6 = 0;
int home7 = 0;
// punkt w formie wektora wykorzystany do polecenia LMOVE
double punkt[]={0,0,-85,15,-90,45};
void setup() {
pinMode(LED_BUILTIN, OUTPUT); //ustawienie diody wbudowanej jako wyjście
Serial.begin(115200); // rozpoczęcie komunikacji Serial z komputerem (przez port programowalny) z prędkościa 115200 baudów/s
delay(1000);
if(r.Connect() == 0) //otworzenie połączenia. jeżeli otwarte, wykonaj kod
{
digitalWrite(LED_BUILTIN, HIGH); //ustawienie stanu diody wbudowanej na wysoki
r.setUartTimeout(1000); //czas Timeout'u na połączenie robot-płytka
r.setMotorOn(); //włączenie silników
Serial.println("Włączono silniki robota");
delay(1000); // opóźnienia w programie dla stabilności
r.Zero(); // zerowanie robota
delay(1000);
Serial.println("Wyzerowano robota");
delay(1000);
r.setHome((double)home1,(double)home2,(double)home3,(double)home4,(double)home5,(double)home6); //ustawienie pozycji domowej robota po konwersji punktu z int na double
r.HOME(30,90,80); // ruch robota do pozycji domowej
delay(1000);
r.executeASCommand("DRAW 5,5,20"); //przesłanie do robota komendy DRAW - przesunięcie liniowe względem BASE o x,y,z
//Zapytanie robota o pozycję karezjańską i wyświetlenie w Serial Monitorze
ret = r.Pose(); // read current position
if (ret.returnCode == 0)
{
Serial.println("Pozycja kartezjańska");
Serial.print(ret.values[0]); //x
Serial.print(" ");
Serial.print(ret.values[1]); //y
Serial.print(" ");
Serial.println(ret.values[2]); //z
delay(200);
}
//Zapytanie robota o pozycję złączową i wyświetlenie w Serial Monitorze
ret=r.JT();
if (ret.returnCode == 0)
{
Serial.println("Pozycja złączowa");
Serial.print(ret.values[0]);
Serial.print(" ");
Serial.print(ret.values[1]);
Serial.print(" ");
Serial.print(ret.values[2]);
Serial.print(" ");
Serial.print(ret.values[3]);
Serial.print(" ");
Serial.print(ret.values[4]);
Serial.print(" ");
Serial.println(ret.values[5]);
}
r.LMOVE(2,40,90,90,punkt,6); // ruch liniowy do punktu "punkt"
delay(1000);
r.setMotorOff(); //ruch robota do pozycji wyłączenia silników i wyłączenie silników.
delay(1000);
r.Disconnect(); //rozłączenie
delay(1000);
digitalWrite(LED_BUILTIN, LOW); //ustawienie stanu diody wbudowanej na niski
}
}
void loop() {
// put your main code here, to run repeatedly:
delay(100);
}Ściągnij plik z kodem źródłowym programu.
Komunikaty odebrane przez port szeregowy komputera:
Jeżeli program utknie po wykonaniu zerowania (dotyczy starszych wersji firmware robota), należy zresetować płytkę przyciskiem Reset.
Zaawansowana aplikacja – sterowanie robotem
Program zaawansowany – użycie drążka analogowego i przycisków do sterowania robotem w przestrzeni liniowej i złączowej, zamykania i otwierania chwytaka oraz przesyłania aktualnej pozycji robota przez UART.
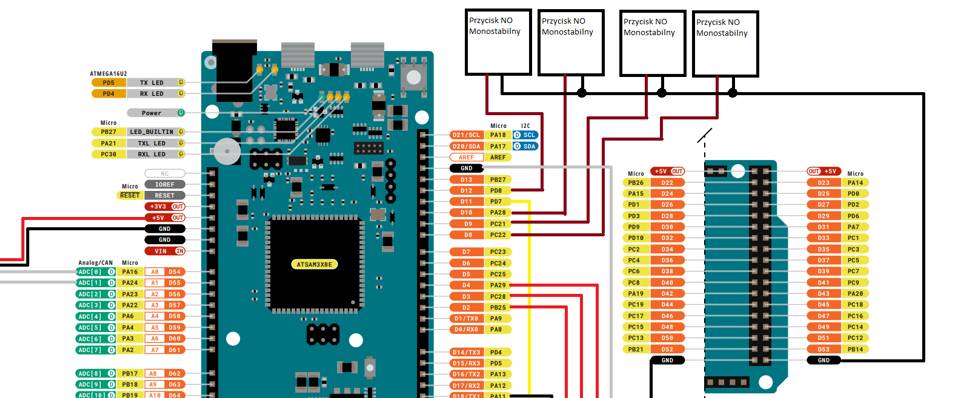
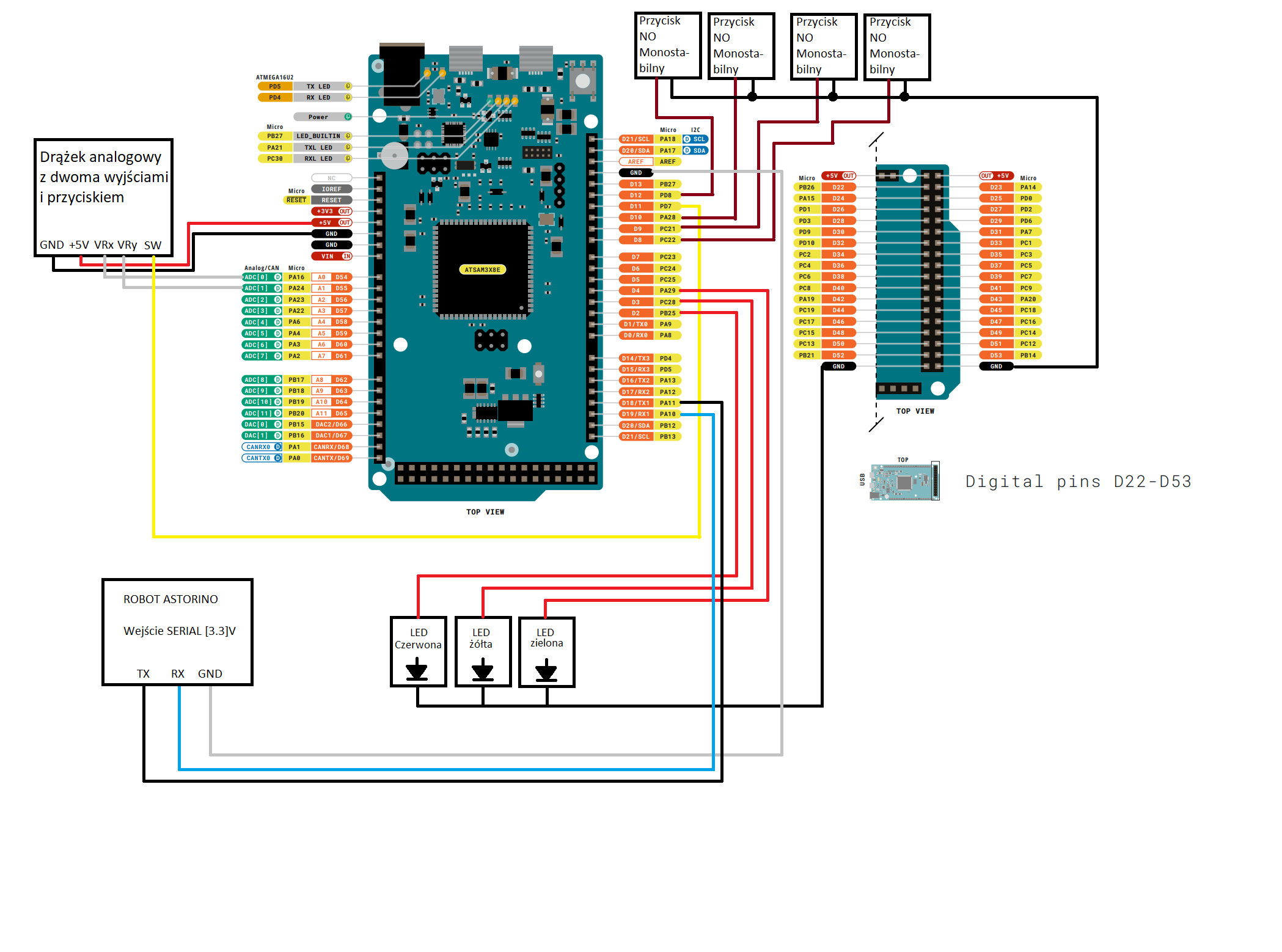
Sposób podłączenia peryferiów (kliknij, aby powiększyć):
Gotowy program:
#include "astorino.h"
astorino r(Serial1);
astorino::RetVal ret;
int home1 = 0;
int home2 = 0;
int home3 = -90;
int home4 = 0;
int home5 = -90;
int home6 = 0;
int home7 = 0;
double point[6];
int x = 0;
int y = 0;
int z = 0;
bool gripper=0;
int length = 6;
int switch1=0;
bool in_joint_mode=0;
void setup()
{
// ustawienie odpowiednich trybów pracy I/O
pinMode(12, INPUT_PULLUP);
pinMode(11, INPUT_PULLUP);
pinMode(10, INPUT_PULLUP);
pinMode(9, INPUT_PULLUP);
pinMode(8,INPUT_PULLUP);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
Serial.begin(115200);
delay(1000);
//Polecenia wykonywane przed oddaniem kontroli do użytkownika
if(r.Connect() == 0)
{
r.setUartTimeout(1000);
digitalWrite(2,HIGH);
r.setMotorOn();
delay(1000);
Serial.println("Włączono silniki");
delay(1000);
r.Zero();
delay(1000);
Serial.println("Wyzerowano robota");
delay(1000);
//r.setHome((double)home1,(double)home2,(double)home3,(double)home4,(double)home5,(double)home6);
r.HOME(30,90,80);
Serial.println("Robot w pozycji domowej");
delay(1000);
Serial.println("Sterowanie użytkownika");
delay(1000);
Serial.println("Tryb liniowy. X,Y");
}
}
void loop()
{
//zmiana trybu ruchu - kartezjański/złączowy
bool mode_switch = digitalRead(10);
if(mode_switch==LOW && in_joint_mode==0)
{
Serial.println("Zmieniono tryb na złączowy. 1,2");
in_joint_mode=1;
switch1=0;
delay(200);
}
else if(mode_switch==LOW)
{
Serial.println("Zmieniono tryb na liniowy. X,Y");
in_joint_mode=0;
switch1=0;
delay(200);
}
//zapalenie diód kartezjański/złączowy
if (in_joint_mode)
{
digitalWrite(3,HIGH);
digitalWrite(4,LOW);
}
else if (in_joint_mode==0)
{
digitalWrite(4,HIGH);
digitalWrite(3,LOW);
}
//zmiana płaszczyzn ruchu kartezjańskiego
int analog_button = digitalRead(11);
if(analog_button==LOW && switch1==0 && in_joint_mode==0)
{
switch1++;
Serial.println("Tryb liniowy. X,Z");
delay(200);
}
else if (analog_button==LOW && switch1==1 && in_joint_mode==0)
{
switch1++;
Serial.println("Tryb liniowy. Y,Z");
delay(200);
}
else if(analog_button==LOW && switch1==2 && in_joint_mode==0)
{
switch1=0;
Serial.println("Tryb liniowy. X,Y");
delay(200);
}
// zmiana złączy ruchu złączowego
if(analog_button==LOW && switch1==0 && in_joint_mode==1)
{
switch1++;
Serial.println("Tryb złączowy. 3,4");
delay(200);
}
else if (analog_button==LOW && switch1==1 && in_joint_mode==1)
{
switch1++;
Serial.println("Tryb złączowy. 5,6");
delay(200);
}
else if(analog_button==LOW && switch1==2 && in_joint_mode==1)
{
switch1=0;
Serial.println("Tryb złączowy. 1,2");
delay(200);
}
// odczyt wartości z wejść analogowych i sterowanie robotem w zależności od nich w układzie kartezjańskim
int yValue = analogRead(A0);
int xValue = analogRead(A1);
if(in_joint_mode==0)
{
switch(switch1)
{
case 0:
//Poruszanie się x,y
if(xValue<600)
{
x=-1;
}
if(xValue>900)
{
x=1;
}
if(yValue<600)
{
y=-1;
}
if(yValue>900)
{
y=1;
}
if (xValue>600 && xValue<900)
{
x=0;
}
if (yValue>600 && yValue<900)
{
y=0;
}
break;
case 1:
//Poruszanie się x,z
if(xValue<600)
{
x=-1;
}
if(xValue>900)
{
x=1;
}
if(yValue<600)
{
z=-1;
}
if(yValue>900)
{
z=1;
}
if (xValue>600 && xValue<900)
{
x=0;
}
if (yValue>600 && yValue<900)
{
z=0;
}
break;
case 2:
//Poruszanie się y,x
if(xValue<600)
{
y=-1;
}
if(xValue>900)
{
y=1;
}
if(yValue<600)
{
z=-1;
}
if(yValue>900)
{
z=1;
}
if (yValue>600 && yValue<900)
{
z=0;
}
if (xValue>600 && xValue<900)
{
y=0;
}
break;
};
//informacja o aktualnej pozycji złączowej robota, wykorzystana do ruchu
}
else if (in_joint_mode==1)
{
ret=r.JT();
for (int i=0;i<6;i++)
{
point[i]=ret.values[i];
}
//sterowanie robotem w zależności od wejść analogowych w przestrzeni złączowej
switch(switch1)
{
case 0:
//Poruszanie się 1,2
if(xValue<600)
{
point[0]++;
}
if(xValue>900)
{
point[0]--;
}
if(yValue<600)
{
point[1]--;
}
if(yValue>900)
{
point[1]++;
}
break;
case 1:
//Poruszanie się 3,4
if(yValue<600)
{
point[2]++;
}
if(yValue>900)
{
point[2]--;
}
if(xValue<600)
{
point[3]--;
}
if(xValue>900)
{
point[3]++;
}
break;
case 2:
//Poruszanie się 5,6
if(yValue<600)
{
point[4]--;
}
if(yValue>900)
{
point[4]++;
}
if(xValue<600)
{
point[5]--;
}
if(xValue>900)
{
point[5]++;
}
};
}
//operacja zmiany typu zmiennych
String x_s=String(x);
String y_s=String(y);
String z_s=String(z);
String bar="DRAW "+x_s+","+y_s+","+z_s;
//wysyłanie komend ruchowych do robota
if(in_joint_mode==0 && (x!=0 || y!=0 || z!=0))
{
r.executeASCommand(bar);
}
else if (in_joint_mode==1)
{
r.LMOVE(2,30,100,100,point,6);
}
// zwracanie pozycji robota na żądanie
bool pozycja = digitalRead(9);
if (pozycja==LOW)
{
ret = r.Pose(); // read current position
if (ret.returnCode == 0)
{
Serial.println("Pozycja kartezjańska");
Serial.print(ret.values[0]); //x
Serial.print(" ");
Serial.print(ret.values[1]); //y
Serial.print(" ");
Serial.println(ret.values[2]); //z
delay(200);
}
ret=r.JT();
Serial.println("Pozycja złączowa");
Serial.print(ret.values[0]);
Serial.print(" ");
Serial.print(ret.values[1]);
Serial.print(" ");
Serial.print(ret.values[2]);
Serial.print(" ");
Serial.print(ret.values[3]);
Serial.print(" ");
Serial.print(ret.values[4]);
Serial.print(" ");
Serial.println(ret.values[5]);
}
//zaciśnięcie chwytaka na żądanie
bool zgripper=digitalRead(8);
if (zgripper==LOW)
{
if (gripper == 0)
{
r.executeASCommand("SIGNAL 57");
Serial.println("Zamknięto gripper");
gripper = 1;
delay(500);
}
else if (gripper == 1)
{
r.executeASCommand("SIGNAL -57");
Serial.println("Otwarto gripper");
gripper = 0;
delay (500);
}
}
//wyłączenie robota na żądanie
bool wylacznik = digitalRead(12);
if (wylacznik == LOW)
{
Serial.println("Wyłączanie silników");
r.HOME(50,90,80);
delay(1000);
r.setMotorOff();
delay(1000);
r.Disconnect();
digitalWrite(2,LOW);
r.HOME(10,90,80);
Serial.println("Wyłączono silniki");
}
}Ściągnij plik z kodem źródłowym programu.
Opis działania programu:
1. Nawiązanie połączenia.
2. Włączenie silników.
3. Zerowanie robota.
4. Ustawienie robota w pozycji HOME.
5. Zezwolenie na sterowanie użytkownika.
Sterowanie użytkownika i peryferia:
- Dioda podłączona pod DO 2 informuje o tym, czy zawarto połączenie z robotem.
- Diody podłączone pod DO 3 i 4 informują o tym, czy sterowanie ruchem odbędzie się odpowiednio w trybie liniowym, czy złączowym.
- Przycisk podłączony pod DI 8 – wciśnięcie powoduje, że robot wystawia stan wysoki na wyjście 57. Kolejne wciśnięcie spowoduje że robot na tym wyjściu wystawi stan niski. W naszym przypadku to wyjście steruje chwytakiem pneumatycznym.
- Przycisk podłączony pod DI 9 – wciśnięcie powoduje zwrot do Serial Monitor pozycji kartezjańskiej i złączowej, w jakiej znajduje się robot.
- Przycisk podłączony pod DI 10 – wciśnięcie powoduje zmianę trybu ruchu gałką analogową między trybem kartezjańskim a złączowym.
- Przycisk podłączony pod DI 12 – wciśnięcie powoduje powrót robota do pozycji domowej, ruch robota do pozycji wyłączenia silników, wyłączenie silników i zakończenie komunikacji z robotem.
- Wciśnięcie gałki analogowej powoduje zmianę płaszczyzny ruchu w trybie ruchu liniowego i zmianę złączy poruszanych w trybie ruchu złączowego. Wysunięcie gałki analogowej spowoduje ruch robota w określonym wcześniej trybie w wybranej płaszczyźnie / z użyciem wybranych złączy.
Zaleca się korzystanie z przycisków, gdy gałka analogowa nie jest wysunięta.
Wszystkie akcje sterujące za wyjątkiem wysunięcia gałki analogowej przesyłają komunikat o wykonanej przez nie akcji przez port szeregowy do komputera.
Informacje przekazywane do komputera przez port szeregowy:

Autor artykułu:
Konrad Kamiński
Praktykant ASTOR
Student III roku kierunku Automatyka i robotyka na Politechnice Poznańskiej