
5 rzeczy o robocie przemysłowym, które robotyk wiedzieć powinien
Kontakt w sprawie artykułu: Kamil Majcher - 2022-04-14

Z tego artykułu dowiesz się:
- Robot przemysłowy – co to jest i z czego się składa?
- Stanowisko zrobotyzowane z robotem przemysłowym – co to jest i jak jest zbudowane?
- Stanowisko zrobotyzowane – jak się programuje taki system?
- Stanowisko zrobotyzowane – jak sterować aplikacją?
- Jak się programuje robota przemysłowego?
1. Robot przemysłowy – co to jest i z czego się składa?
1.1. Robot przemysłowy – definicja
Norma PN-EN ISO 8373:20011 przedstawia następującą definicję robota przemysłowego:
„…Manipulacyjny robot przemysłowy jest automatycznie sterowaną, programowaną, wielozadaniową maszyną manipulacyjną o wielu stopniach swobody, posiadającą własności manipulacyjne lub lokomocyjne, stacjonarną lub mobilną dla ważnych zastosowań przemysłowych”.

Norma przedstawia również podstawowe parametry charakteryzujące roboty przemysłowe:
- liczba osi sterowanych, wynosząca zazwyczaj w zależności od robota od 2 do 7; parametr ten decyduje o stopniach swobody, które przekładają się na stopień skomplikowania czynności, które robot jest w stanie wykonać; każda z osi posiada określony zakres przemieszczeń kątowych,
- udźwig, czyli maksymalny ciężar, który może być podniesiony lub przemieszczony przez robota przemysłowego w inne miejsce,
- zasięg, definiowany jako promień obszaru, w ramach którego robot jest w stanie operować,
- prędkość ruchu, określająca z jaką maksymalną prędkością robot może poruszać każdą z osi; parametr ten określany jest w rad/s dla osi obrotowych lub w mm/s dla osi liniowych,
- dokładność i powtarzalność, które określają precyzję ruchu robota.
1.2 Robot przemysłowy – z czego się składa?
Roboty przemysłowe składają się z 3 podstawowych elementów:
- manipulator – część wykonawcza robota przemysłowego
W zależności od wersji, manipulatory posiadają różną liczbę ruchomych osi (2-7) oraz różne udźwigi (nawet do 2300 kg).
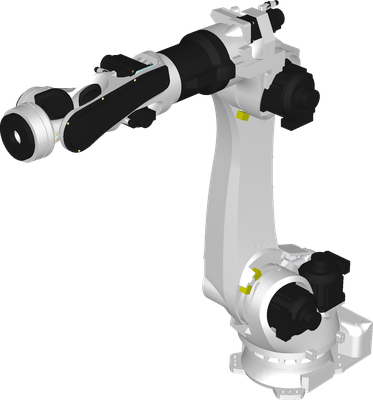

Istnieją różne rodzaje manipulatorów w zależności od zastosowania: manipulatory konwencjonalne i manipulatory z przelotowym przekładniami – często manipulatory robotów spawalniczych posiadają strukturę, która pozwala na przeprowadzenie przewodów, np. pakiety do spawania, zgrzewania czy dodatkowe wiązki pneumatyczne lub elektryczne.
- kontroler – jednostka sterująca robota przemysłowego
Manipulator robota jest częścią wykonawczą, a jednostką sterującą jest kontroler. Kontroler robota przemysłowego wyposażony jest w szereg układów elektronicznych, które pozwalają na sterowanie napędami robota, jego układami bezpieczeństwa oraz realizację logiki zapisanej w języku tekstowym lub w blokowym.
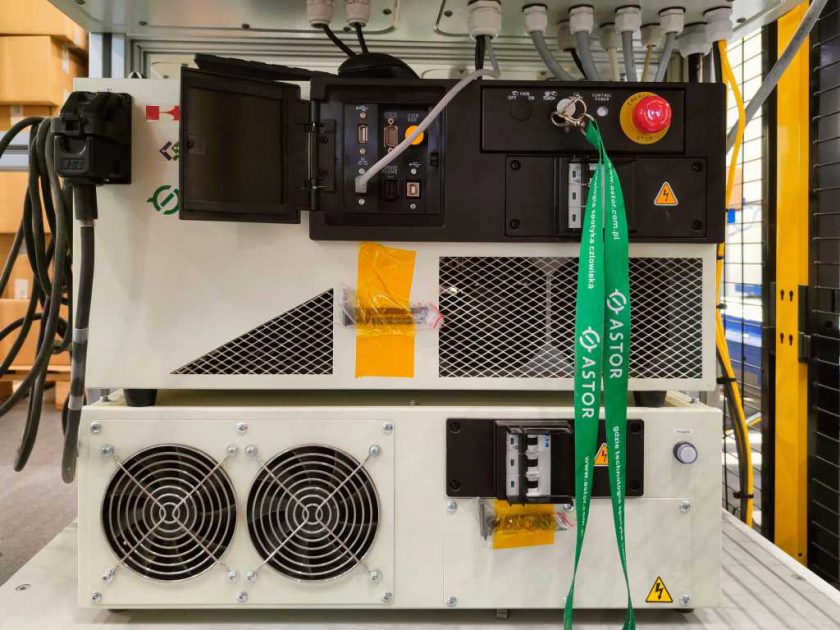
Dodatkowo – z punktu widzenia automatyka i robotyka – ważnymi elementami są możliwości komunikacyjne kontrolera – te jednostki obsługują zazwyczaj większość protokołów takich jak Ethernet IP, Profinet, Profibus itp.
Ciekawostka: układy elektroniczne są coraz mniejsze, więc jeśli porównamy kontrolery kilkudziesięcioletnie z aktualnymi rozwiązaniami, to okaże się, że są one kilkukrotnie mniejsze. Czasem kontrolery są umieszczane w ramionach manipulatorów.
- teach pendant – czyli potocznie mówiąc pilot do sterowania robotem przemysłowym
Teach pendant pozwala na realizację ruchów robota w poszczególnych osiach czy układach, ale też na podgląd statusu pracy robota – stanu komunikacji, wejść/wyjść.

Teach pendant zwykle posiada przyciski bezpieczeństwa, czyli tzw. „deadmeny”, za pomocą których można zezwalać na uruchamianie robota w trybie ręcznym. Umożliwia on programowanie robota w wybranym języku oraz kontrolę wykonywanego programu – zatrzymywanie, uruchamianie itp.
Roboty przemysłowe nie muszą posiadać i czasem nie wykorzystują teach pendant’a – te same funkcje mogą być realizowane przez oprogramowanie narzędziowe.
Oprogramowanie narzędziowe ma szereg zastosowań. Z jego poziomu użytkownik nawiązuje komunikację z kontrolerem, odczytując jego parametry, zapisane programy, funkcje czy punkty. Umożliwia on zmianę konfiguracji i programowanie robota w języku tekstowym. Dodatkowe opcje oprogramowania narzędziowego pozwalają na sterowanie i podgląd rzeczywisty stanu sygnałów.
2. Stanowisko zrobotyzowane z robotem przemysłowym – co to jest i jak jest zbudowane?
Stanowisko zrobotyzowane jest dużo szerszym pojęciem, ponieważ oprócz robota przemysłowego obejmuje również inny osprzęt i elementy – tzw. peryferia. Na przykładzie stanowiska do paletyzacji zobaczcie, co wchodzi w jego skład.
2.1. Chwytak do robota przemysłowego
Elementem, który pozwala w tym przypadku manipulować detalem – przenosić, i trzymać go oraz odkładać – jest tutaj chwytak pneumatyczno-mechaniczny, który za pomocą szczęk jest w stanie chwytać pudełka i odkładać je na paletę w wybranym miejscu.
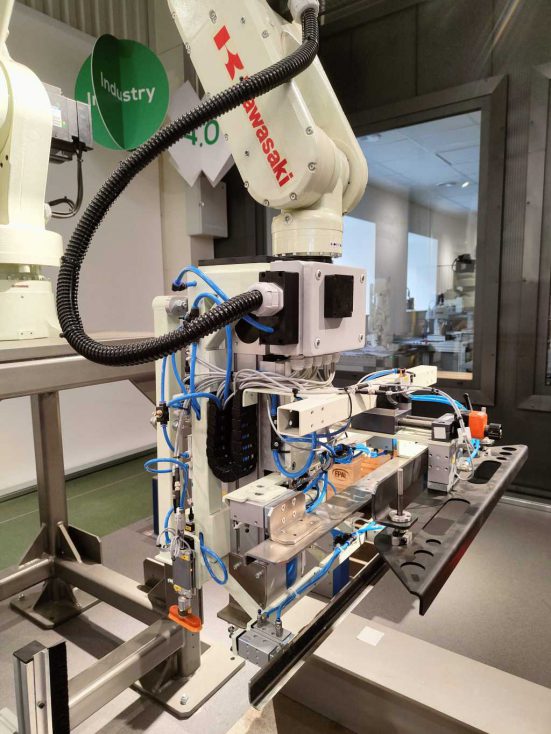
Chwytak do robota realizuje przenoszenie i transport przekładek, które mogą być układane pomiędzy warstwami pudełek. Dodatkowo jest wyposażony w szczęki mechaniczne, który chwytają paletę i przemieszczają ją do wybranego punktu stanowiska.
W ramieniu robota często znajdują się również przewody pneumatyczne oraz sygnały cyfrowe, które są wyprowadzone na wysokości 3/4 osi – co pozwala na wykorzystanie wewnętrznej wiązki robota do sterowania nim.
2.2. System bezpieczeństwa
Każde stanowisko zrobotyzowane posiada elementy systemu bezpieczeństwa. Dostarczając je na terenie Unii Europejskiej, producent powinien dołączyć dokument potwierdzający zgodność z powszechnie obowiązującymi się normami. Wymagania te ściśle określają zasady, jakie powinny spełnić użyte elementy systemu bezpieczeństwa.

Elementami systemu bezpieczeństwa mogą być:
- wygrodzenia – obszar pracy robota jest oddzielony panelami pełnymi lub siatkowymi, które są dobierane na podstawie uprzednio przeprowadzonej oceny ryzyka,
- na nich z kolei zamontowane są kurtyny świetlne, które po „przecięciu” wiązki w czasie cyklu zatrzymają ruch robota awaryjnie,
- główne wejście do stanowiska robota przemysłowego jest monitorowane za pomocą skanera, który posiada odpowiednio wydzielone strefy, pozwalające np. na przejazd robota mobilnego w trakcie pracy stanowiska,
- układ monitorowania osi robota – w trakcie pracy stanowiska taki układ może samodzielnie kontrolować i sprawdzać, w jakiej przestrzeni robot się znajduje w danym momencie,
- przyciski bezpieczeństwa E-STOP – wewnątrz i na zewnątrz stacji, na teach pendancie i kontrolerze robota znajdują się takie przyciski – pozwalają one awaryjnie zatrzymać stanowisko.
Układy bezpieczeństwa komunikują się pomiędzy sobą poprzez sterownik bezpieczeństwa, sprawujący nadrzędną kontrolę nad wbudowanymi w stanowisko elementami bezpieczeństwa.
Dzięki tym funkcjonalnościom można dynamicznie sterować i monitorować strefy w których porusza się robot. W sytuacji, kiedy robot przemysłowy przekroczy strefę bezpieczną, stanowisko zostanie zatrzymane awaryjnie – konieczny wtedy będzie wyjazd ręczny ze strefy niebezpiecznej.
2.3. Systemy intralogistyki i system sterowania stanowiskiem zrobotyzowanym
Aby całościowo zrealizować poprawnie proces paletyzacji, wykorzystywane są transportery lekkie oraz ciężkie, odpowiedzialne za transport pudełek oraz palety w przedstawianej aplikacji. Sterowane są one za pomocą falowników.
Kontrolę nad całą aplikacją sprawuje sterownik PLC, który komunikuje się z robotem, komputerem przemysłowym, robotem mobilnym oraz falownikami. Wszystkie komponenty napędów i sterowania wbudowane są w szafę elektryczną.

Na widocznym komputerze przemysłowym wyświetlana jest aplikacja HMI. Komunikacja pomiędzy sterownikiem PLC a robotem mobilnym MiR odbywa się bezprzewodowo przy użyciu nowoczesnej technologii 5G.
3. Stanowisko zrobotyzowane – jak się programuje taki system?
Każdy element stanowiska zrobotyzowanego powinien być zaprogramowany osobno i każdy z nich posiada własne dedykowane oprogramowanie, które umożliwia realizację wybranych funkcji.
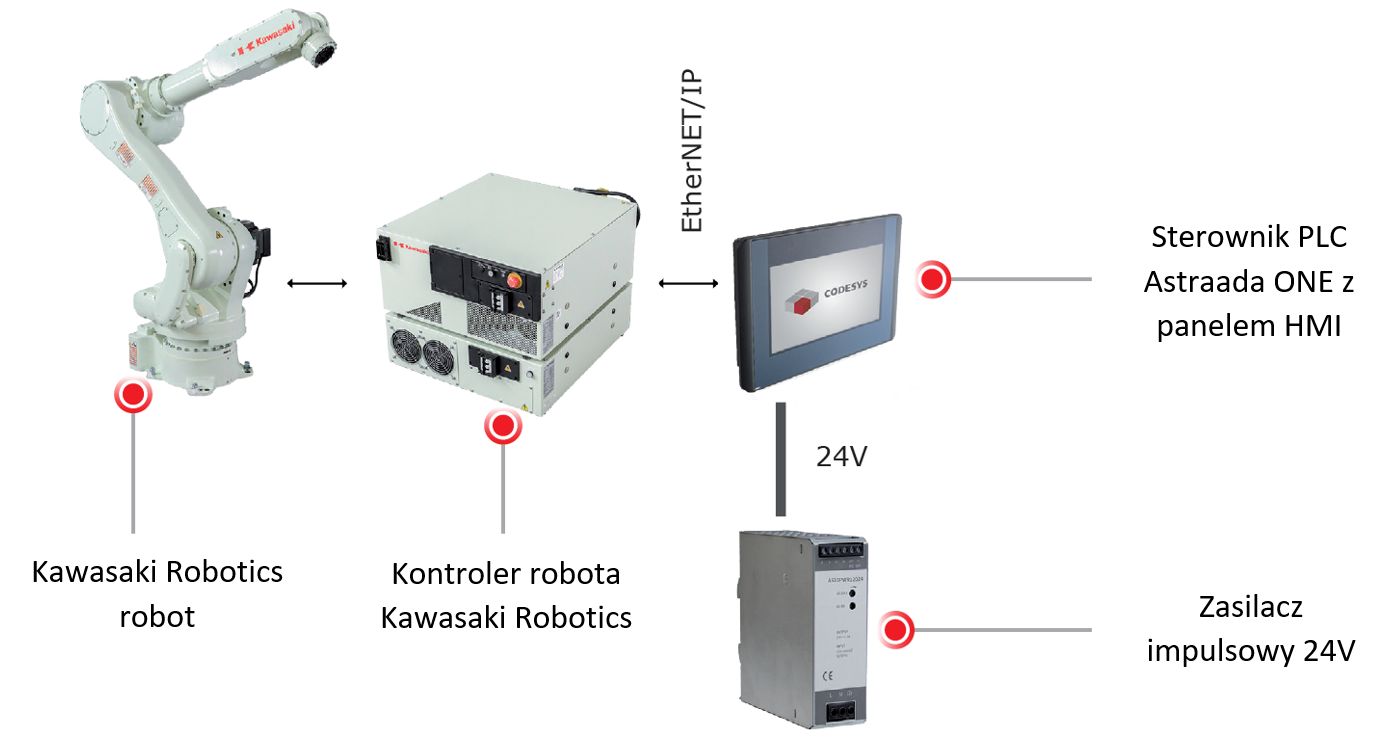
3.1. Programowanie sterownika PLC
Odbywa się ono za pośrednictwem oprogramowania narzędziowego specyficznego dla danego sterownika. Sama logika programu zrealizowana jest za pomocą tekstu strukturalnego – pozwala to na uruchamianie poszczególnych sekwencji, realizujących paletyzację.
W odpowiednim momencie uruchamiane są falowniki, wzywany robot mobilny z przekładkami, zgoda na uruchomienie programu robota. Dodatkowo w PLC realizowane są odczyty danych z czujników, kontrolujących prawidłową pracę aplikacji.
3.2. Programowanie robota przemysłowego
Konfigurację i programowanie robota przemysłowego można zrealizować na kilka sposobów – sama część logiczna zaprogramowana została przy użyciu oprogramowania narzędziowego, natomiast programy ruchu zostały stworzone częściowo na teach pendancie i częściowo w oprogramowaniu pozwalającym na wygenerowanie schematu ułożenia kartonów na palecie, który jest zainstalowany na komputerze przemysłowym.
Sam program jest wysyłany do robota przemysłowego wraz z chmurą punktów – robot precyzyjnie wie, w którym momencie, jaki punkt, w jakich warunkach ma osiągnąć. -> Czytaj więcej w punkcie 5.
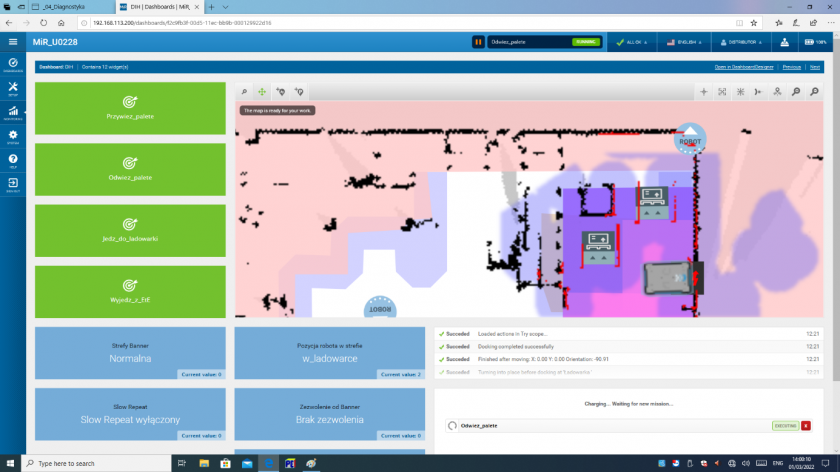
3.3. Programowanie robota mobilnego
Robot mobilny jest programowany z poziomu przeglądarki internetowej, którą można uruchomić na smartfonach, tabletach czy komputerach.
Źródło: ASTOR
Uczymy robota mobilnego ścieżki, którą ma wykonać, zapisując ją jako misję i w kolejnym etapie dzięki komunikacji możemy wywołać robota w odpowiednim momencie z poziomu sterownika PLC.
3.4. Komunikacja całego systemu
Najważniejszy aspekt to komunikacja całego systemu – w tym wypadku jest realizowana w kilku protokołach: Ethernet IP, EtherCAT i TCP IP. Jest ona zestawiona pomiędzy sterownikiem PLC a poszczególnymi urządzeniami, komunikującymi się we własnych protokołach.
Przyszłość, jaką niesie Przemysł 4.0, pozwoli na standaryzację komunikacji i programowania.
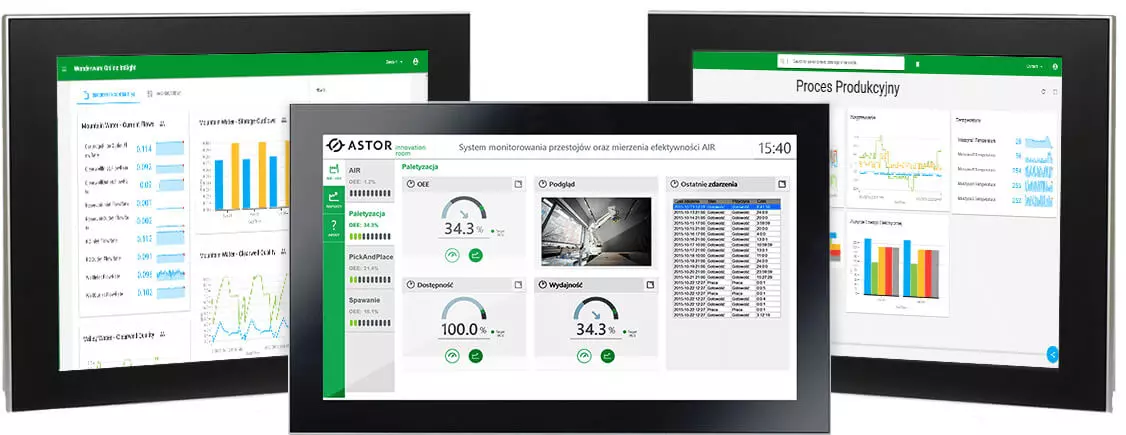
4. Stanowisko zrobotyzowane – jak sterować aplikacją?
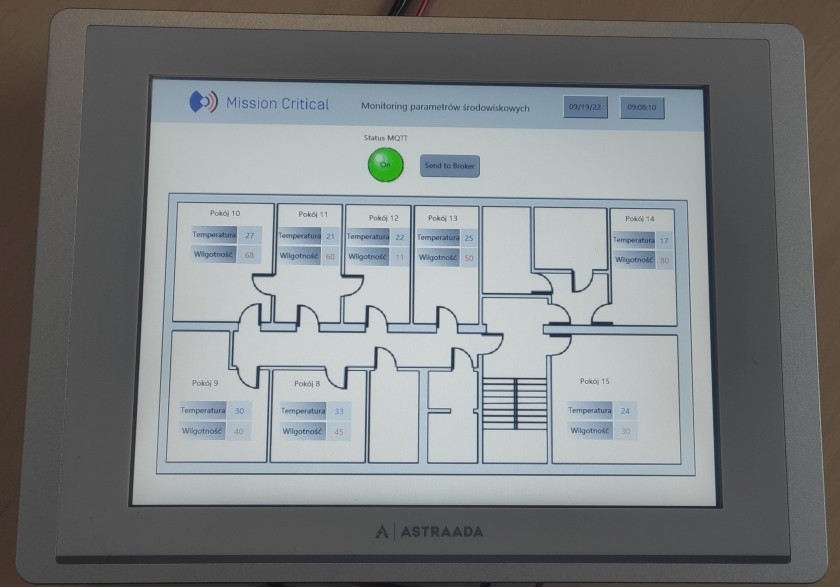
Stacja zrobotyzowana posiada panel użytkownika HMI. Ekrany stosowane do sterowania wyświetlane są przez przeglądarkę internetową – dzięki tej funkcjonalności można uruchomić tę aplikację na urządzeniach mobilnych.

Źródło: ASTOR
Dodając bezprzewodową komunikację 5G, możemy uzyskać dostęp do niej w zasadzie z każdego urządzenia.
Operator uruchamia aplikację, przechodząc do panelu użytkownika za pomocą klawisza Start. Jeśli stanowisko zostanie zatrzymane w trakcie pracy, można wznowić jego pracę.
Dodatkowo można podejrzeć też statusy poszczególnych urządzeń, gdzie wyświetlane są informacje zebrane z robotów, czujników – pozwala to również na precyzyjną diagnostykę w przypadku awarii stanowiska.
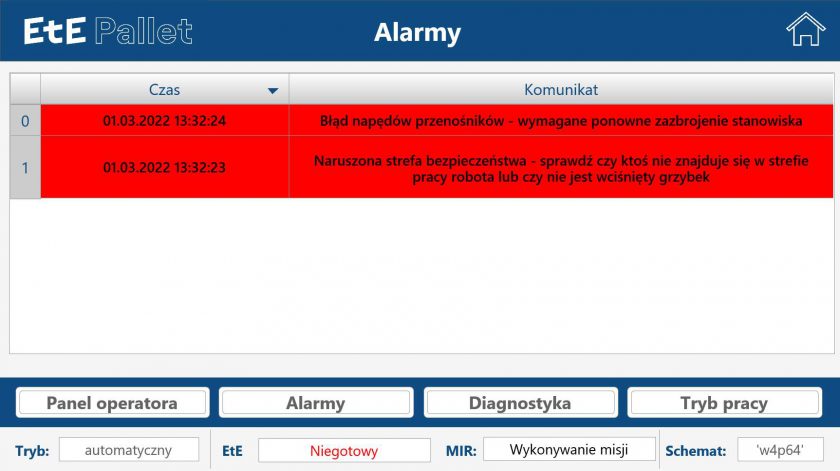
W przypadku samego robota przemysłowego, w sytuacjach awaryjnych po przełączeniu na tryb uczenia, jest możliwość poruszania robotem ręcznie z poziomu teach pendanta, uruchamiając napędy i przesuwając robota za pomocą odpowiednich klawiszy.
W momencie pojawienia się błędu, sterownik PLC za pośrednictwem HMI poinformuje użytkownika o kodzie błędu i podpowie, co mogłoby pomóc w rozwiązaniu problemu.
5. Jak się programuje robota przemysłowego?
Istnieje kilka możliwości programowania robotów przemysłowych.
5.1. Programowanie robota przemysłowego – język blokowy
Pierwszym z nich i najczęściej wykorzystywanym jest język blokowy. Ideowo, polega to na dojechaniu do wybranego punktu w przestrzeni, dla którego definiuje się szereg parametrów, np. oczekiwanie na wybrane wejścia, czy załączenie wybranych wyjść.
Np. w przypadku robota do zgrzewania podajemy numer zadania, które źródło powinno wczytać przed rozpoczęciem procesu. Po zdefiniowaniu tych parametrów przechodzi się do zapisu ścieżki. Oczywiście w dowolnym momencie można redefiniować poszczególne kroki, przeuczając pozycje bądź parametry ruchu, takie jak prędkość czy dokładność.
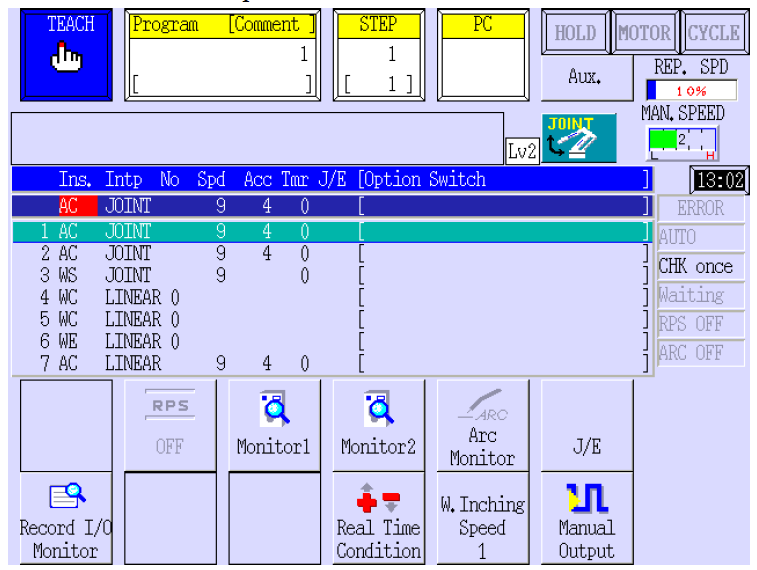
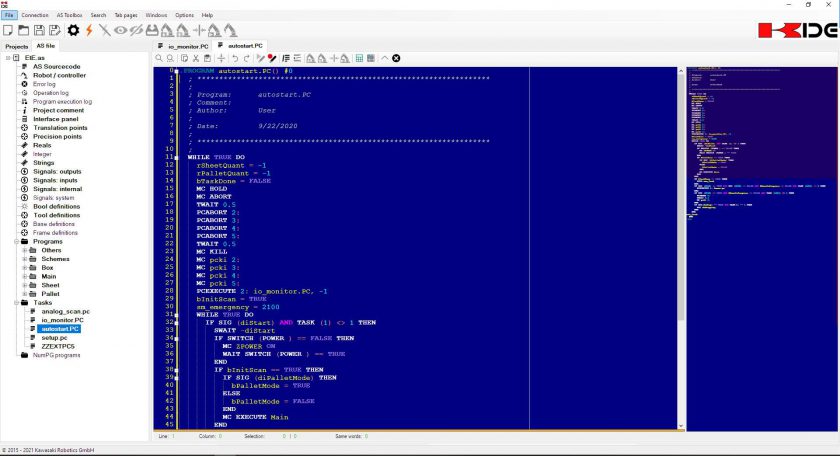
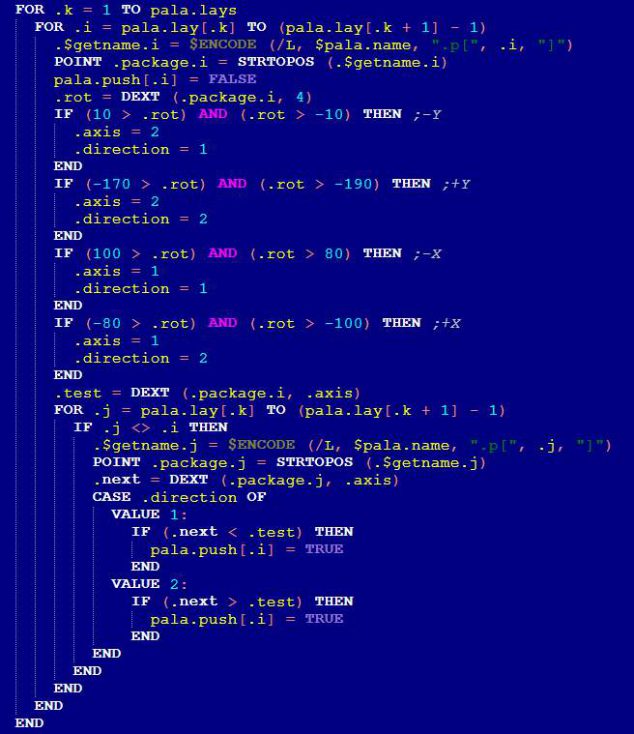
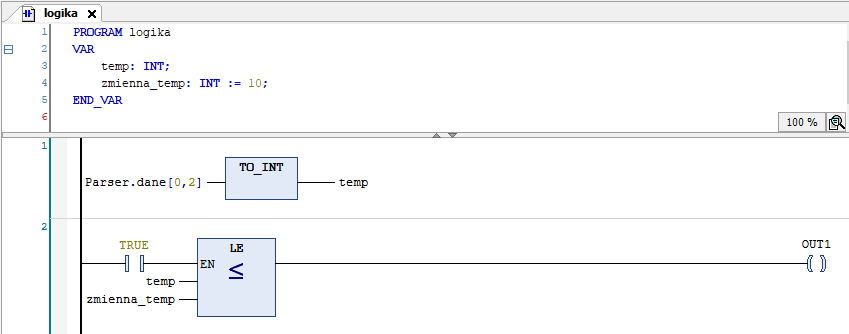
5.2. Programowanie robota przemysłowego – język tekstowy
Drugą formą programowania robota przemysłowego jest język tekstowy, który pozwala na przygotowanie logiki bądź programu ruchu na komputerze i następnie wgranie go do robota i nauczenie pozycji.
Tę formę można zastosować do programów ruchu, ale też do wątków równoległych realizujących operacje logiczne. W nich możemy tworzyć rozbudowane funkcje za pomocą popularnych komend i struktur, takich jak: IF ELSE, pętli FOR, WHILE czy instrukcji skoku GOTO.
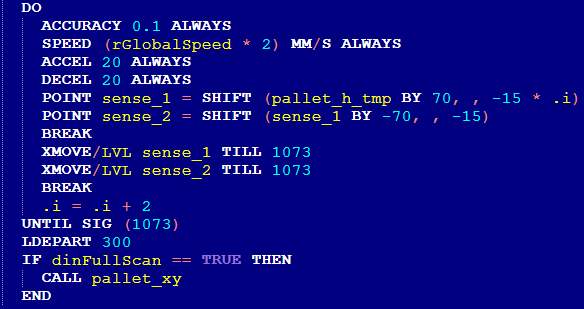
źródło: ASTOR
W programie ruchu robota można używać również instrukcji warunkowych, pętli w celu optymalizacji kodu.
źródło: ASTOR
Dodatkowo obydwa języki można stosować zamiennie w przypadku programowania ruchu robota RPM (Robot Program Motion) – część w języku blokowym, część w języku tekstowym.
Jeśli chodzi o naukę punktów, to można to zrobić, dojeżdżając do wybranej pozycji i zapisując ją albo uprzednio napisany program wykonywać z teach pendantem i zapisywać pozycje dla poszczególnych kroków.
Inną i coraz popularniejszą formą jest programowanie z poziomu oprogramowania CAD/CAM, gdzie jest stworzony cyfrowy bliźniak, który odwzorowuje rzeczywiste stanowisko zrobotyzowane.

Z poziomu komputera przygotowuje się trajektorie ruchu, która następnie jest generowana jako gotowy program, który można wgrać bezpośrednio do kontrolera robota.
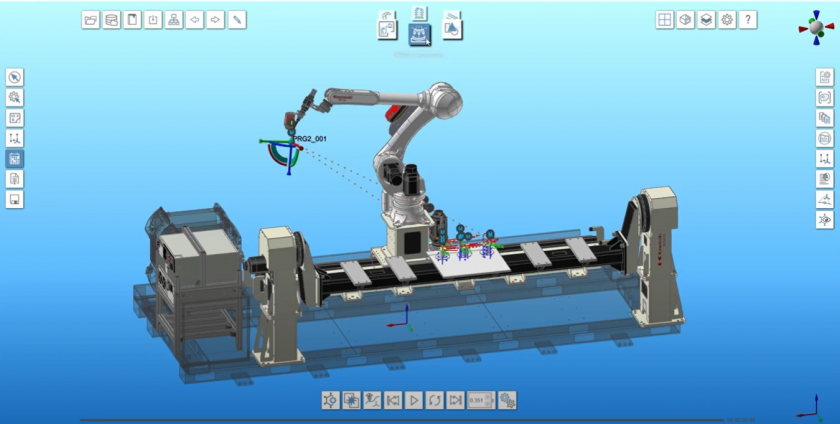
Jeśli stanowisko jest dobrze skalibrowane, taki program można wykonywać bez korekt pozycji. W innych przypadkach można zastosować rozwiązania, które będą wspierały korektę trajektorii w czasie rzeczywistym.
Chcesz wiedzieć więcej? Zapytaj autora w komentarzu i/lub umów się na wizytę w ASTOR Robotics Center.
Źródła:
1 http://bc.pollub.pl/Content/12907/PDF/roboty-new.pdf
Autor:
Kamil Majcher
Lider ds. rozwoju rozwiązań zrobotyzowanych
ASTOR Robotics Center




Sól jest słona, cukier słodki a słońce świeci. W zasadzie tyle. Jakie normy bezpieczeństwa? Jak zrobić ocenę ryzyka? Itd.