Automatyzacja procesu sortowania z wykorzystaniem robota Astorino
Kontakt w sprawie artykułu: Łukasz Giza - 2026-03-12
Dzięki temu poradnikowi dowiesz się jak zasymulować proste stanowisko zrobotyzowane, programowane online przy pomocy oprogramowania narzędziowego Astorino. Napiszemy i przeanalizujemy krok po kroku program pozwalający na przenoszenie kostek oraz ich sortowanie. Następnie program wgramy do robota Astorino i przetestujemy w rzeczywistości.

1. Potrzebne urządzenia oraz oprogramowanie
Do wykonania aplikacji potrzebujemy następujących elementów:
- Robot Astorino wraz z oprogramowaniem.
- Wydrukowane kostki lub ich odpowiednik – 3 sztuki, zależnie od liczby iteracji.
- Wydrukowane kostki lub ich odpowiednik z metalem – 2 sztuki, zależnie od liczby iteracji.
- Podajnik kostek sterowany sygnałami I/O z poziomu robota.
- Czujnik indukcyjny do detekcji kostek, podłączony do robota.
- Chwytak dla robota Astorino umożliwiający manipulacje kostkami.
- Laptop lub komputer stacjonarny z portem Ethernet oraz USB.
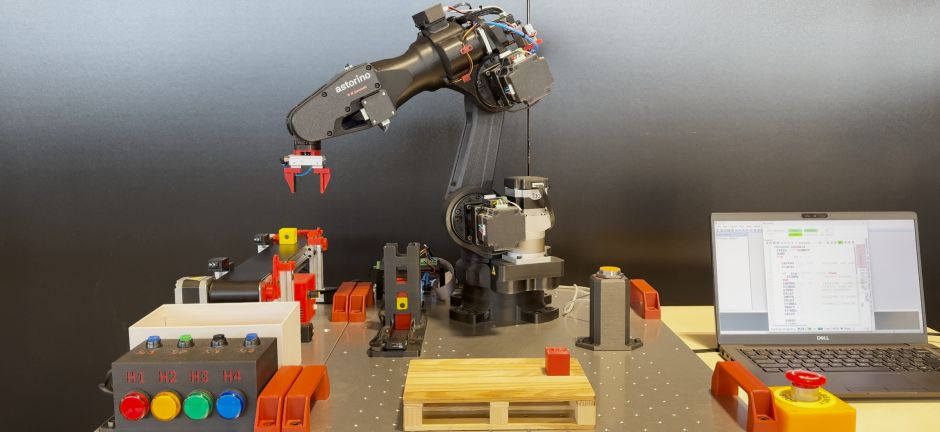
2. Stanowisko z robotem Astorino
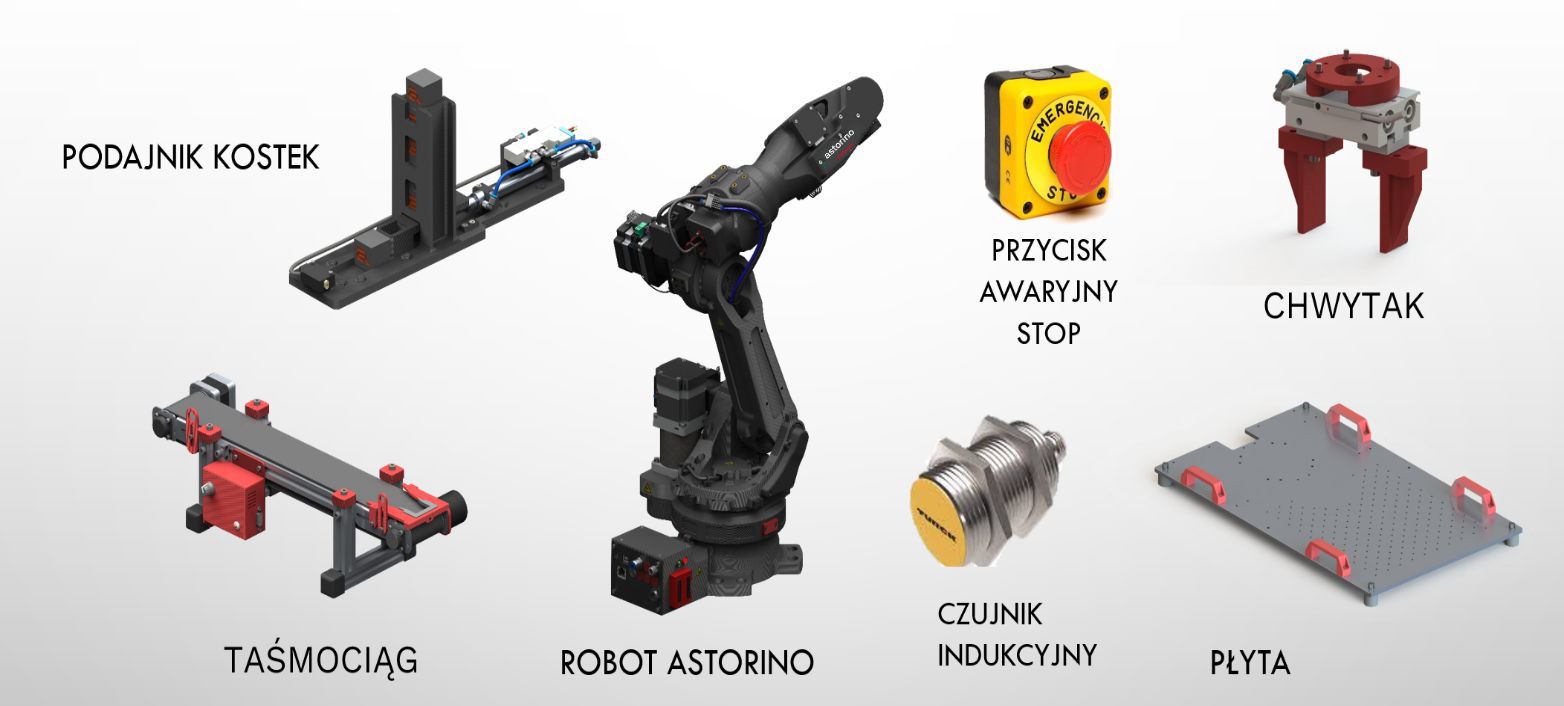
2.1 Elementy stanowiska
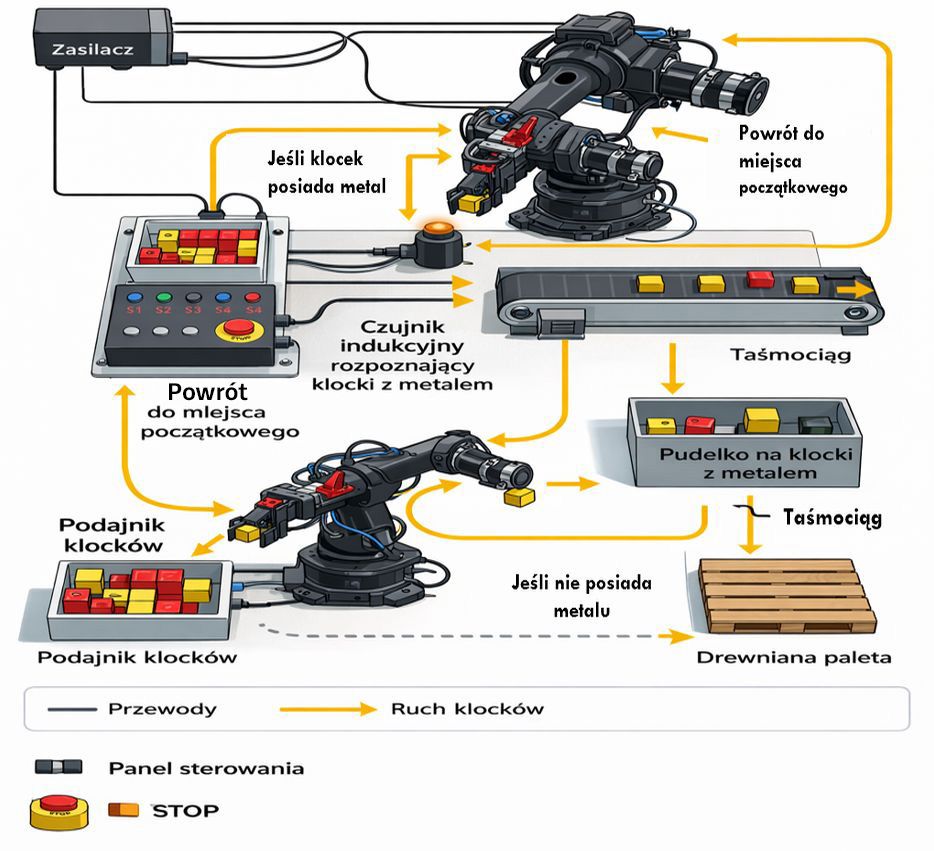
Stanowisko składa się z elementów przedstawionych na poniższym rysunku:
2.2 Ustawienie robota
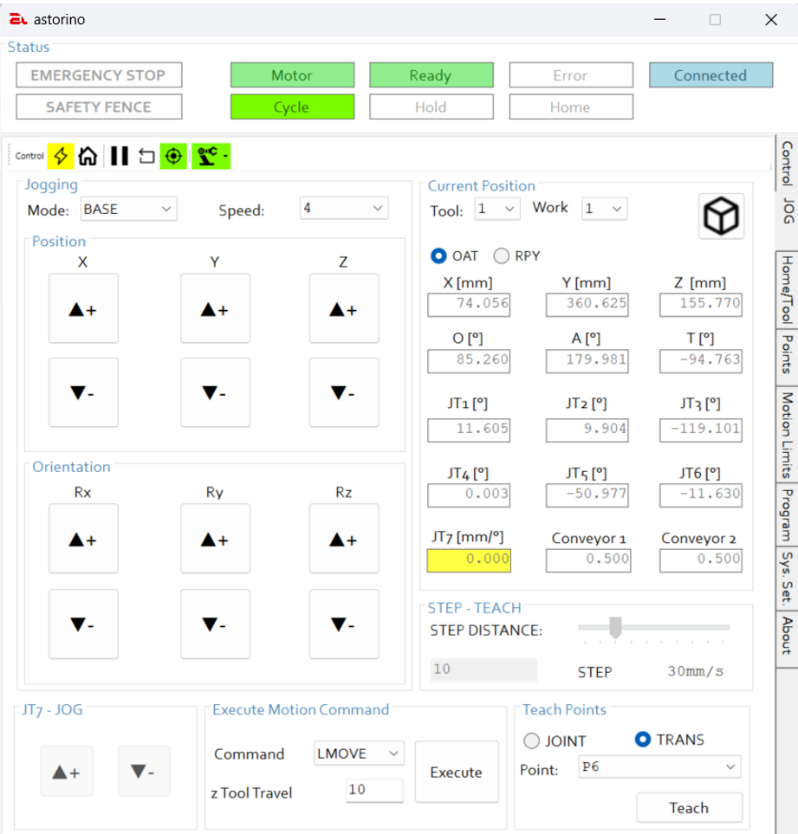
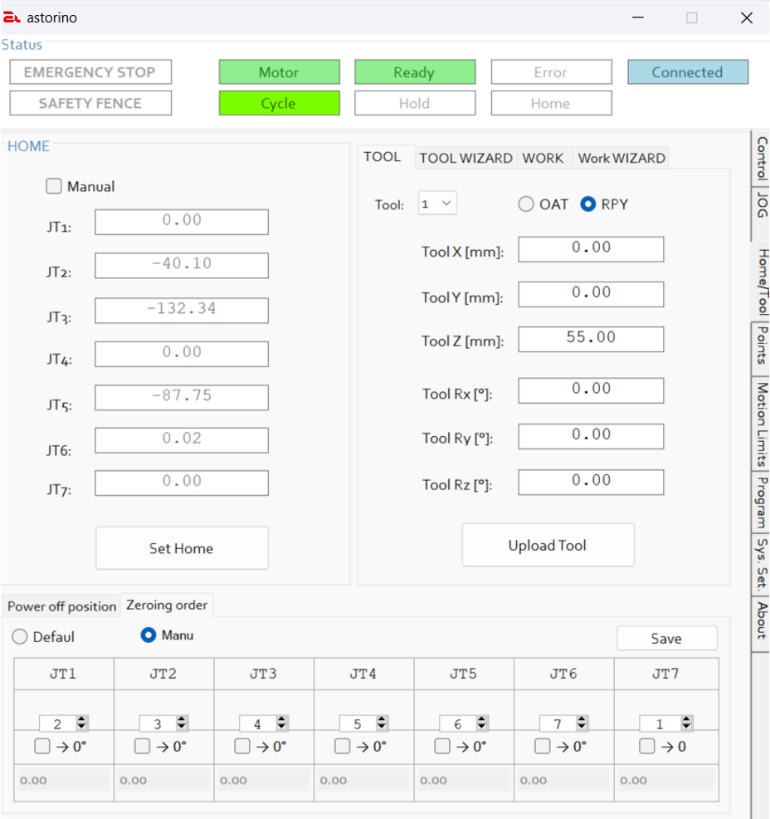
Zaczniemy od ustanowienia punktu początkowego, w którym robot będzie zaczynał program. Domyślnie będzie to pozycja HOME (rys. 4), którą możemy zapisać przy pomocy menu pokazanego poniżej. Należy dojechać w trybie JOG (rys. 3) do zadanej pozycji i nacisnąć Set Home (rys. 4).
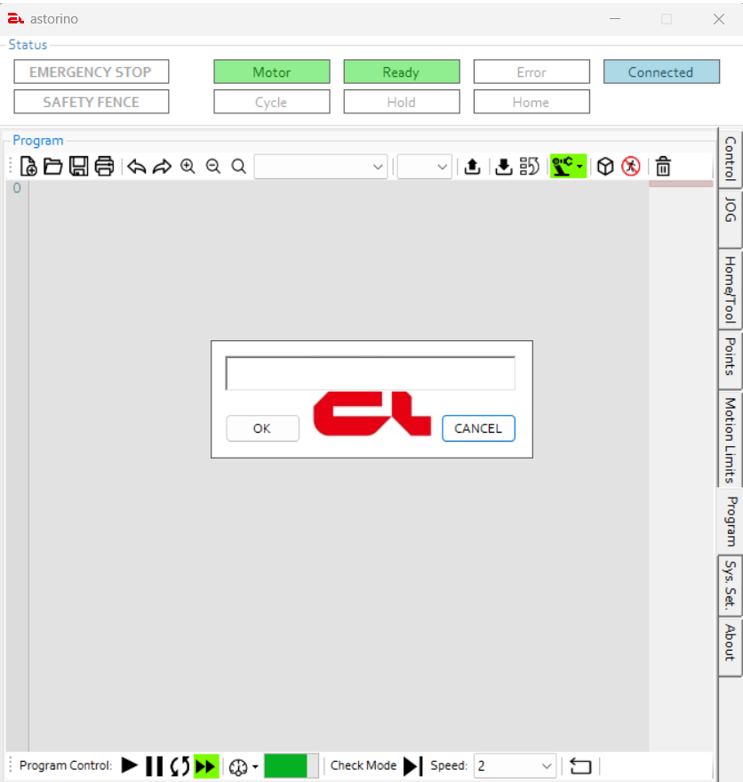
Tworzymy program poprzez naciśnięcie przycisku Nowy Program i ustanowienie nazwy:
Do pozycji HOME dojedziemy z określonymi parametrami. Wykorzystamy funkcje SPEED, DECEL, ACCEL, czyli odpowiednio prędkość, hamowanie, przyspieszenie. Dopisek ALWAYS pozwoli zastosować parametry do całego programu, chyba że zostaną zmienione w trakcie. Przygotujemy też robota do poboru kostek, czyli otworzymy mu chwytak, sterując odpowiednim sygnałem, w naszym przypadku jest to sygnał 57.
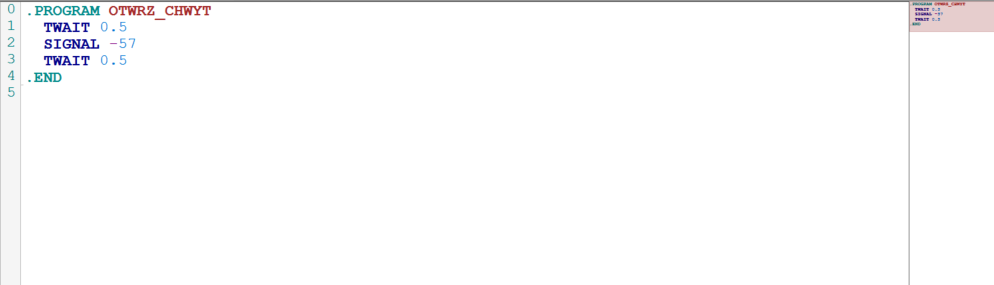
Najlepiej użyć do tego podprogramu z dodaną funkcją z małym opóźnieniem t=0,5 s, aby pozwolić przesterować się przekaźnikowi elektrozaworu. Podprogram wywołujemy funkcją CALL. W tej aplikacji wykorzystujemy chwytak pneumatyczny o rozstawie szczęk odpowiednim do kostek o wymiarach 25x25x25 mm. Te wymiary będą nam definiowały kolejne parametry, takie jak odstępy między kostkami.
2.3 Treść programu
Należy napisać kod, dzięki któremu będzie wykonywana następująca sekwencja operacji:
1. Robot podnosi klocki z wyznaczonego miejsca, którym jest podajnik.
2. Po zebraniu klocka robot podjedzie pod czujnik indukcyjny, który rozróżni, czy klocek posiada w sobie metal. Jeżeli tak, ułoży go w odpowiednim miejscu na taśmociągu.
3. Jeżeli czujnik uzna, że klocek nie posiada w sobie metalu, robot ustawi go na palecie.
4. Po ustawieniu klocka na taśmociąg zostanie on przesunięty do pudełka.
5. Po zakończonym cyklu robot wraca do miejsca początkowego.
3. Kod programu
W programie zostały użyte m.in. funkcje:
- FOR … TO – jest to pętla powtarzająca fragment programu określoną liczbę razy. W tym przypadku zmienna I przyjmuje wartości od 0 do 4, więc program wykona się 5 razy.
- LMOVE – powoduje ruch robota po linii prostej do określonego punktu.
- LDEPART – instrukcja ta powoduje oddalenie się robota od aktualnego punktu o określoną odległość (w tym programie o 50 mm).
- IF … THEN … ELSE – instrukcja warunkowa pozwala na wykonanie różnych części programu w zależności od spełnienia określonego warunku. Jeżeli warunek jest spełniony (TRUE), wykonywana jest pierwsza część kodu.
Jeżeli warunek nie jest spełniony (FALSE), wykonywana jest druga część kodu, znajdująca się po słowie ELSE. - SHIFT – ta instrukcja służy do przesuwania punktu w przestrzeni o określoną wartość. W tym programie punkt jest przesuwany w osi X o 30 mm.
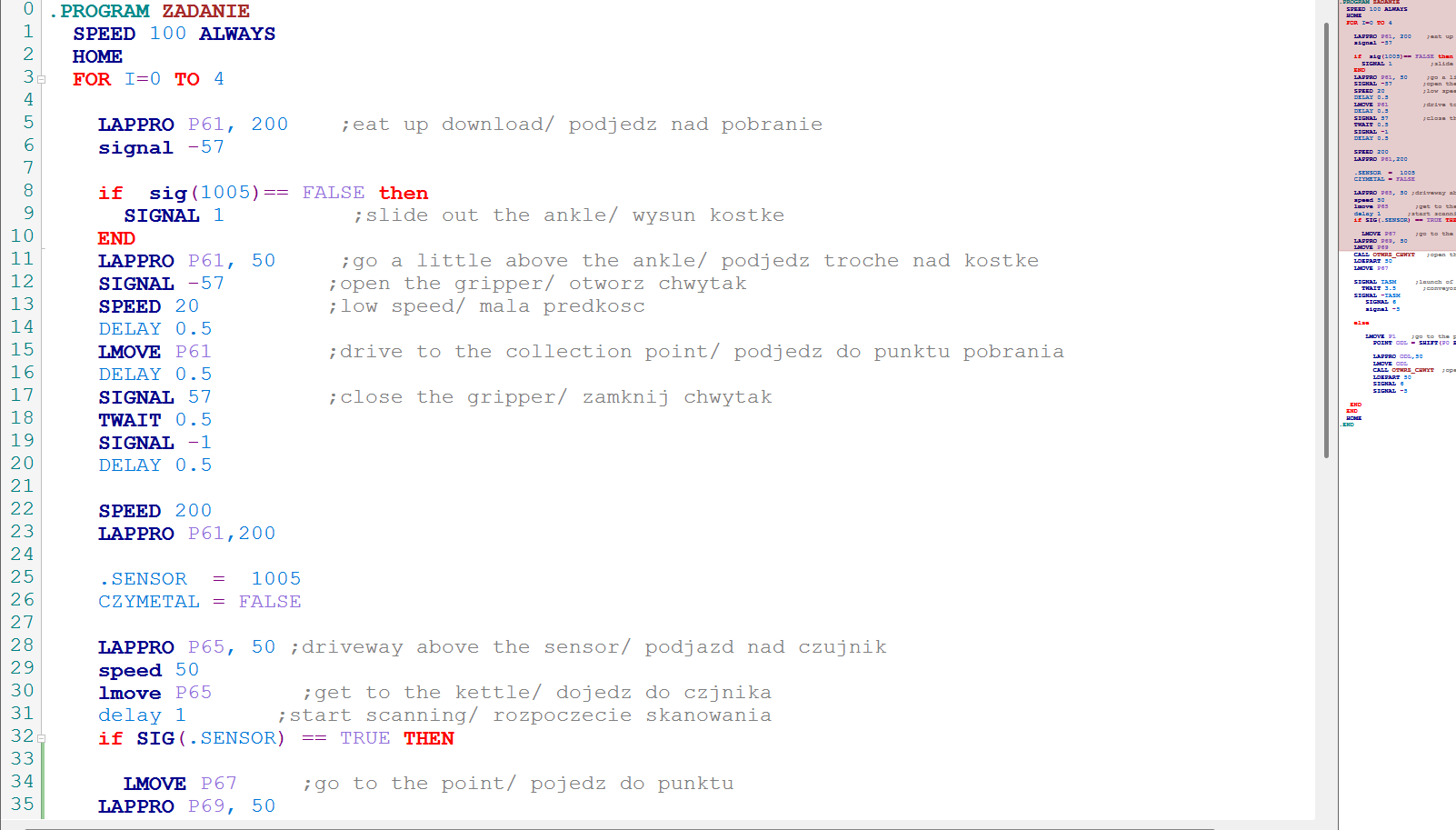
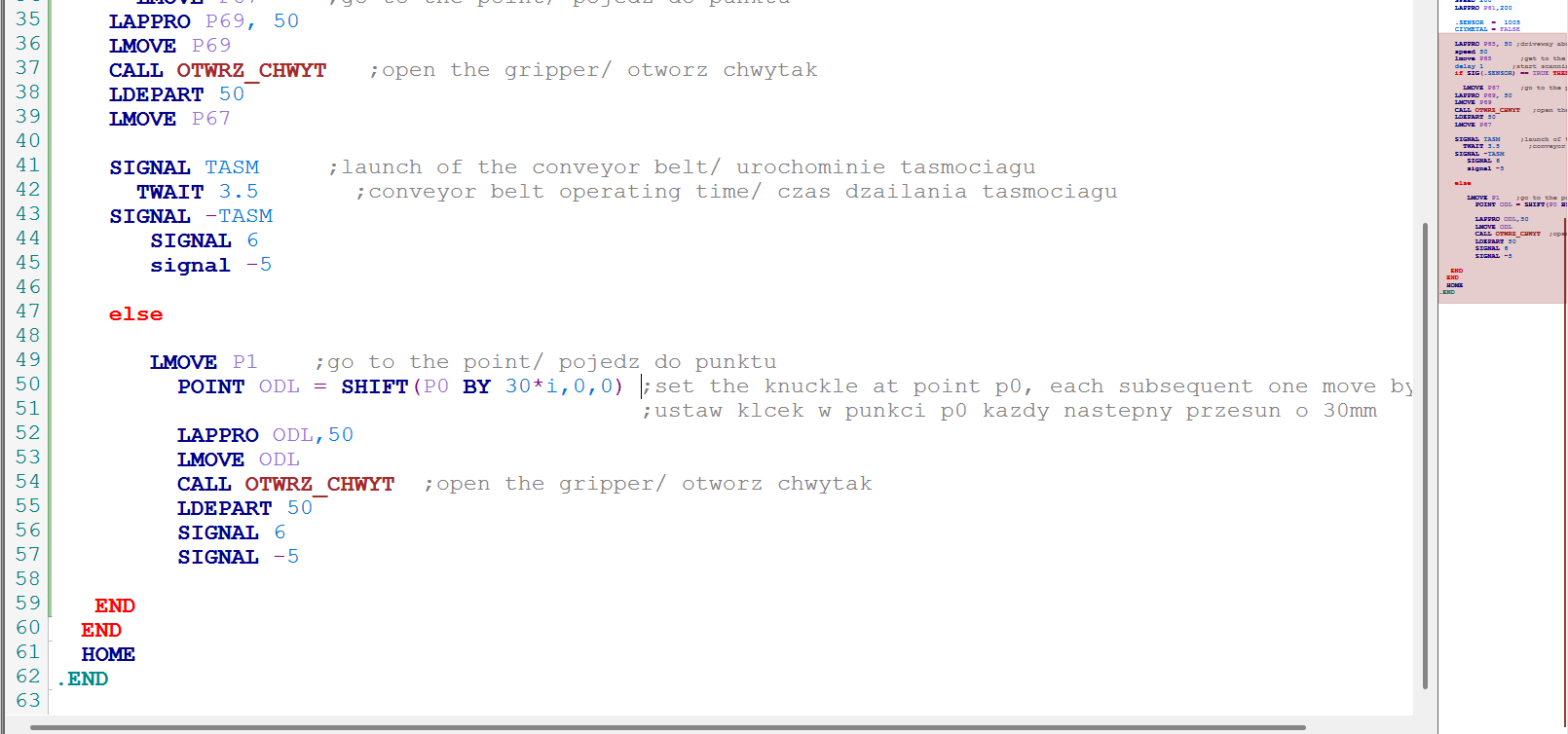
W programie został użyty podprogram OTWRZ_CHWYT,wywołany za pomocą funkcji CALL.
4. Prezentacja działania stanowiska
5. Błędy i rozwiązania
W celu wyeliminowania typowych błędów, które mogą się pojawić w tej aplikacji upewnij się, że firmware robota Astorino został zaktualizowany do najnowszej wersji.
W przypadku innych błędów należy skontaktować się z pomocą techniczną ASTOR – telefonicznie (12 424 00 88), mailowo (support@astor.com.pl) lub przez stronę internetową: https://www.astor.com.pl/wsparcie.html
Zobacz też:
Robot edukacyjny Astorino – kurs dla początkujących
Autor artykułu i aplikacji:
Michał Okrajek
Praktykant ASTOR