Cubic-S – cum funcționează modulul opțional de siguranță la roboții Kawasaki Robotics și care este scopul său?
În acest articol veți afla:
- ce este Cubic-S pentru roboții de la Kawasaki Robotics,
- de ce și în ce scop este utilizat,
- ce funcții de siguranță pot fi selectate la utilizarea Cubic-S.

Modulul Cubic-S pentru roboții Kawasaki Robotics este responsabil pentru asigurarea siguranței prin monitorizarea mișcării robotului și oprirea acestuia în cazul unei mișcări neautorizate. Cubic-S se caracterizează prin configurarea ușoară și rapidă a funcțiilor de siguranță.
Rețineți că Cubic-S:
- poate funcționa în mod manual și automat, în funcție de configurație,
- este modulul principal (master),
- va funcționa în aproape toate aplicațiile în care:
- roboții cooperează cu oamenii,
- zona de lucru a robotului este limitată și există spații de lucru înguste,
- sunt utilizate instrumente periculoase, de ex. fascicul laser.
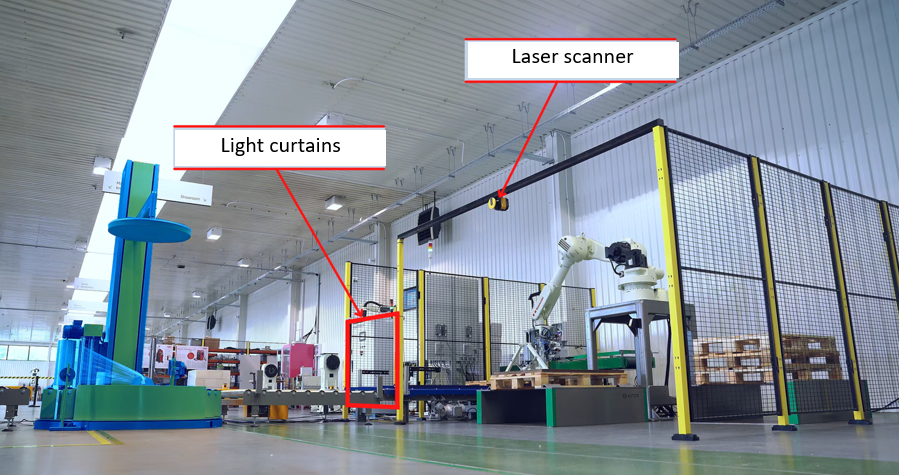
Imaginea prezintă un exemplu de stație robotică Kawasaki Robotics cu modulul Cubic-S. Scanerul laser și cortina luminoasă sunt marcate în imagine. Laserul permite monitorizarea intrării robotului MiR (Robot Industrial Mobil) pentru a ridica paletul de la stație.
Acest laser este capabil să distingă dacă cineva intră în zona de lucru. Când un robot MIR intră în zonă, stația de lucru poate funcționa normal, dar când o persoană intră în zonă, întregul ciclu de lucru se oprește imediat. Nu este nevoie de grilaje sau garduri pentru ca modulul Cubic-S să funcționeze.
Cortinele luminoase sunt situate pe partea stângă a stației – acolo unde se află transportorul cu role. Această cortină interceptează și oprește întregul proces atunci când o persoană intră în zonă.
Aflați cum să instalați modulul de siguranță Cubic-S pentru roboții Kawasaki Robotics:
*În plus, în videoclipul de mai jos puteți vedea aplicația Cubic-S:
Alegerea modulului Cubic-S pentru roboții Kawasaki Robotics oferă o siguranță mai mare atunci când lucrați cu aceste dispozitive. Vă rugăm să rețineți că această opțiune este principală pentru toate celelalte module. Ce înseamnă asta? Dacă o persoană intră în zona de pericol, modulul Cubic-S va putea reacționa mai repede decât un operator uman care apăsă butonul de oprire de urgență. Datorită acestui aspect, alegerea acestei opțiuni incă din etapa de selectare a robotului, oferă o valoare adăugată atât de mare.
Există 8 funcții de siguranță din care puteți alege prin modulul Cubic-S. Unele funcții pot fi activate sau dezactivate în funcție de intrările și ieșirile de siguranță (12 dintre ele ; 8 sunt configurabile, în timp ce 4 au funcționalități atribuite permanent), insă și independent de acestea.
8 funcții de siguranță Cubic-S pentru roboții Kawasaki Robotics:
Cubic-S: funcție de monitorizare a spațiului de mișcare al robotului.
Funcția de monitorizare a zonei de mișcare a robotului permite determinarea spațiului în care lucrul robotului este permis sau nu. Sunt luate în considerare punctele și liniile componentelor brațului robotului, precum și elementele legate de instrument.
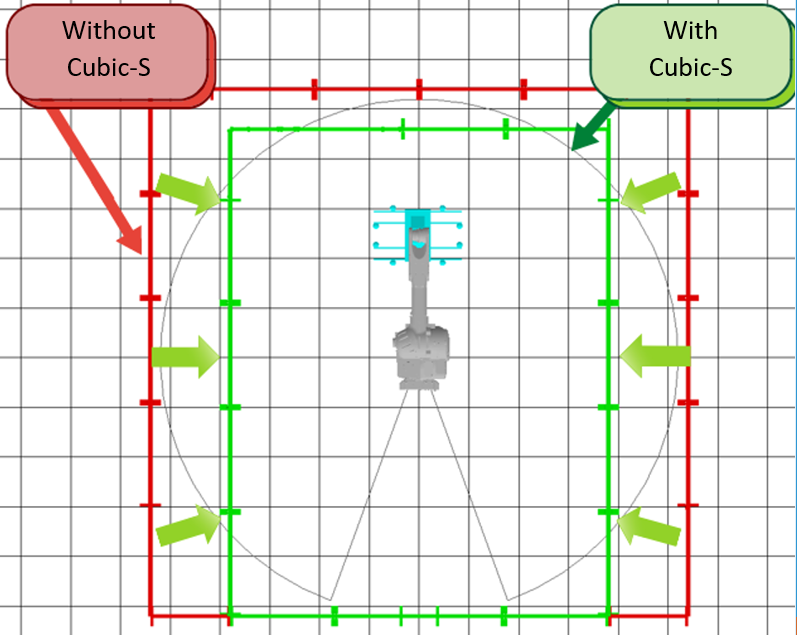
In imagine sunt prezentate două opțiuni. Prima din dreapta utilizează modulul Cubic-S, cu zona marcată cu verde și săgeți suplimentare desenate, iar cea din stânga cu roșu: fără Cubic-S instalat. După cum puteți vedea cu ușurință, la utilizarea opțiunii Cubic-S, puteți reduce semnificativ zona de lucru a robotului, facilitând implementarea și cooperarea acestuia cu alte mașini.
Cubic-S: funcție de monitorizare a articulațiilor
Această funcție vă permite să specificați limite pentru articulațiile individuale ale robotului. Când valoarea limită este depășită, când atinge limita articulației, robotul Kawasaki Robotics este adus la o oprire de urgență și nu este nevoie de un comutator suplimentar de zonă limită. Este posibil să limitați mișcarea fiecărei axe separat.
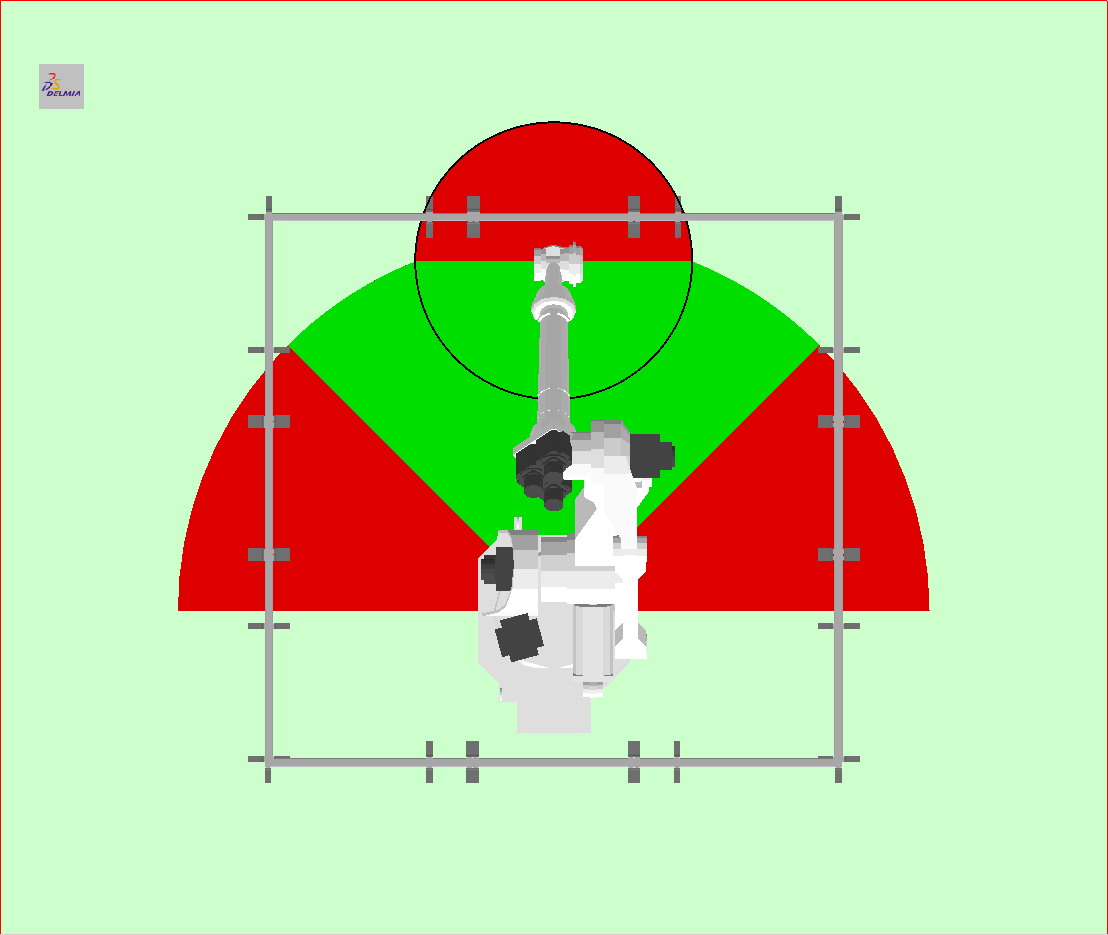
Imaginea prezintă axa 1 și axa 6 la un robot Kawasaki. Zona de rotație a primei axe, indicată de semicercul mare, este limitată și robotul poate lucra doar în unghiul verde. Zona de rotație a axei a șasea, marcată cu prin cercul mic, arată că robotul poate funcționa la un unghi maxim de 180 de grade. Cu această funcție puteți limita astfel unghiul de rotație al axelor individuale. Cu Cubic-S, fiecare axă poate fi configurată individual fără a mai fi necesară utilizarea opritoarelor mecanice.
Cubic-S: funcție de monitorizare a vitezei
Cu această opțiune puteți verifica viteza robotului în raport cu TCP (Punctul Central al Instrumentului). Dacă apare o schimbare bruscă a vitezei, modulul Cubic-S va opri robotul Kawasaki Robotics în modul de urgență.
Ilustrația prezintă un covoraș de siguranță (dreptunghi portocaliu) – aici este activată funcția de control al vitezei.
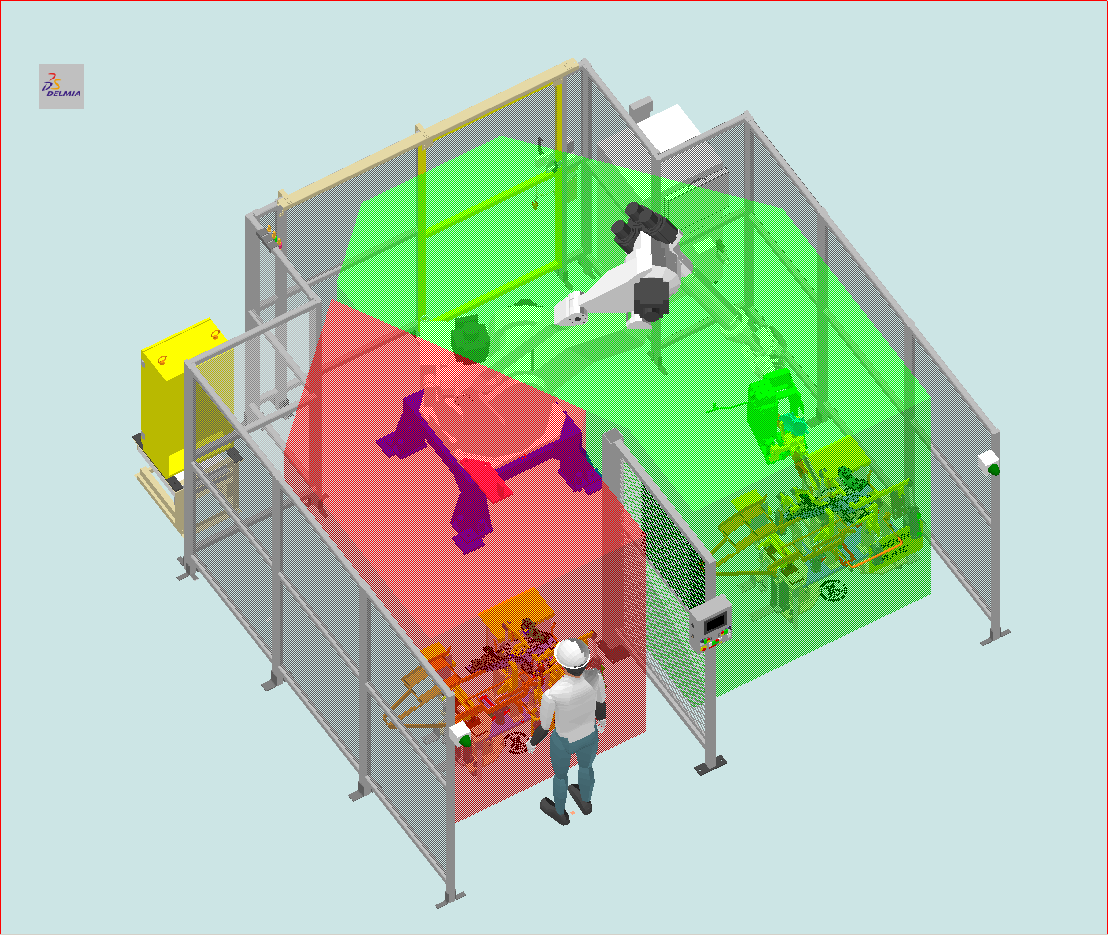
Cubic-S: funcție de monitorizare a opririi
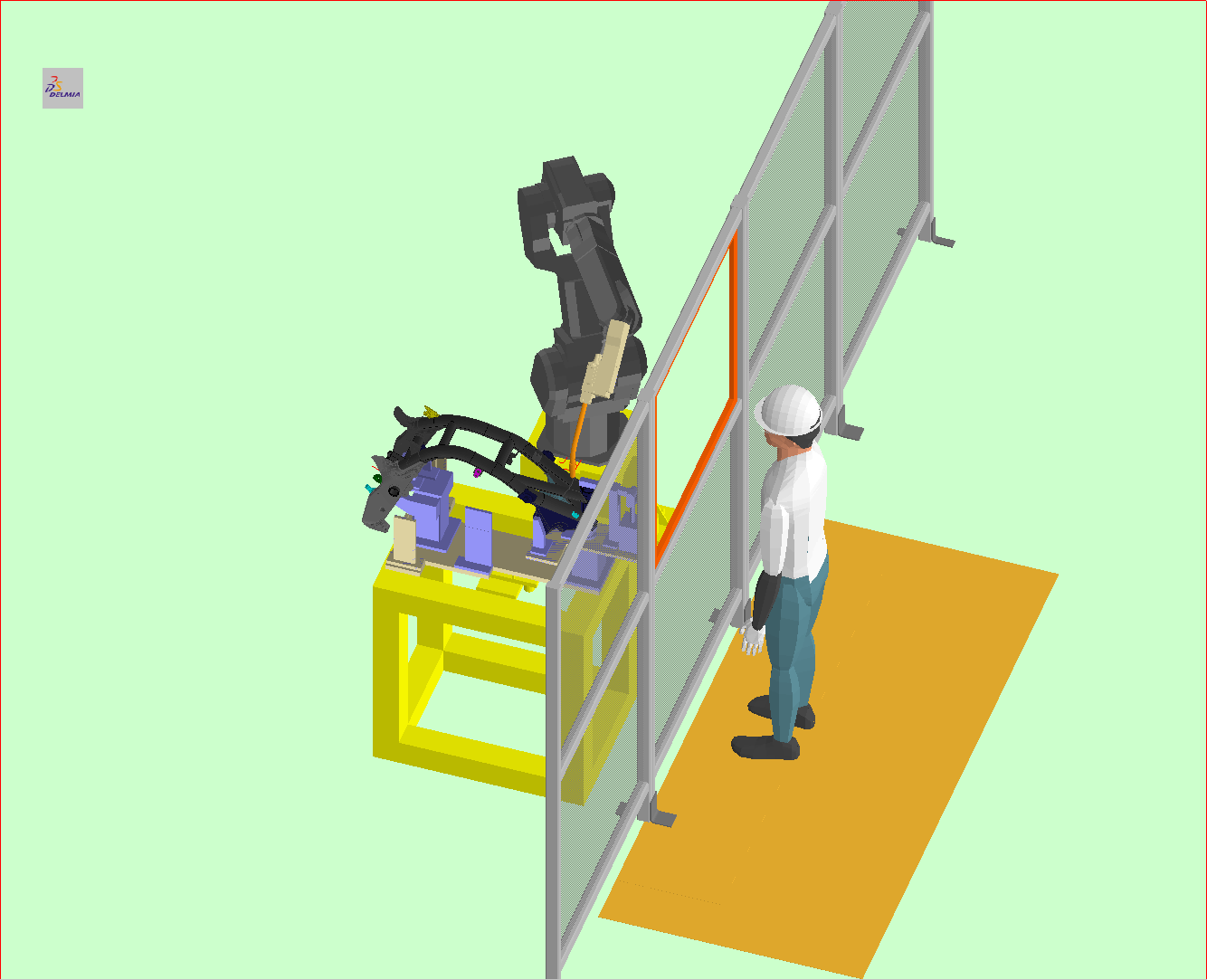
Această funcționalitate vă permite să controlați robotul Kawasaki sau axa sa auxiliară in modul de staționare. În cazul unei mișcări, alimentarea cu energie a unităților robotului este întreruptă imediat și frânele sunt aplicate.

Un bun exemplu este simularea stației robotice, așa cum se arată în figură. În momentul schimbării piesei de prelucrat, când operatorul intră în zona de lucru a robotului, adică traversează cortina luminoasă, modulul Cubic-S monitorizează dacă robotul începe să se miște – iar dacă da, modulul oprește robotul.
Cubic-S: funcție de monitorizare a orientării instrumentului
Prin utilizarea acestei opțiuni este posibil să verificați orientarea instrumentului. Un bun exemplu este un instrument montat pentru tăiere cu jet de apă sau sudare cu laser, oriunde operația necesită un fascicul de un anumit mediu.
Dacă unghiul permis de deplasare al instrumentului este depășit, robotul este adus la oprirea de urgență. Pot fi definite cinci intervale de orientare a instrumentului. Acest lucru face imposibilă direcționarea instrumentului către operator sau departe de zona de lucru.
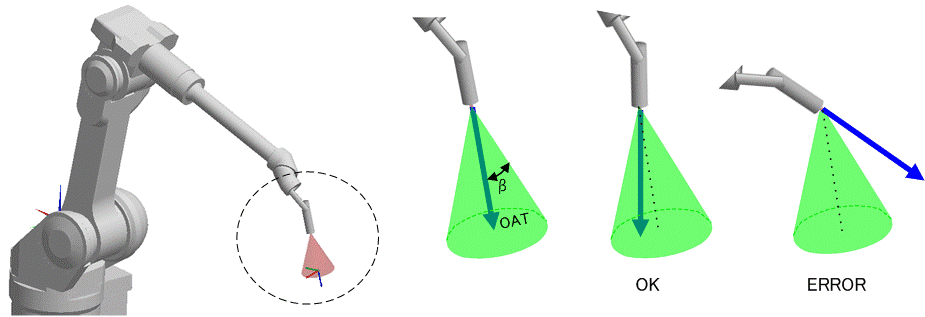
Imaginea prezintă un robot cu un instrument montat la capătul brațului său care utilizează un flux/fascicul incident, iar dacă instrumentul se balansează prea mult, poate provoca pericol. Prin urmare, este necesar să limitați unghiul, astfel încât instrumentul să nu se miște în afara câmpului definit în raport cu sistemul de coordonate al instrumentului.
Imaginile prezintă forma zonei definite și monitorizarea de către Cubic-S (conul verde) a fluxului/fasciculului (săgeata albastră). Când fluxul este în interiorul conului, ca în aceste prime două ilustrații – situația este acceptabilă, dar când iese în afara acestuia, apare o eroare, ca în ultima figură prezentată. Când fasciculul iese în afara zonei Cubic-S, robotul Kawasaki Robotics se oprește imediat.
Cubic-S: funcție de oprire de protecție
Cubic-S poate fi combinat cu dispozitive de securitate externe, cum ar fi cortine și lasere. Acest lucru permite oprirea robotului Kawasaki Robotics în 3 moduri diferite.
Oprirea de protecție poate funcționa independent în mod manual și automat. Este permisă o oprire de categoria „2”, ceea ce înseamnă că atunci când această oprire de protecție este declanșată, robotul va decelera și va intra în starea de monitorizare a opririi.
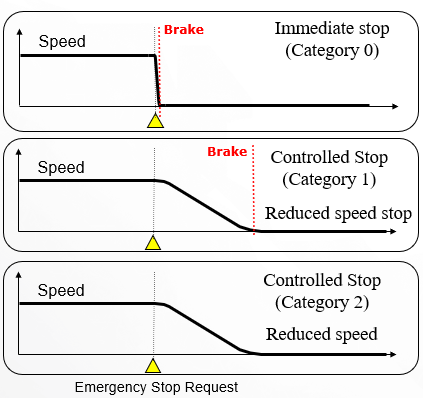
Imaginea prezintă trei moduri de oprire a robotului:
„0” – alimentarea cu energie a motoarelor este deconectată și frânele sunt aplicate.
„1” – oprire controlată, urmată de oprirea motoarelor și aplicarea frânelor.
„2” – oprire controlată, apoi robotul este menținut în modul de monitorizare a stării STOP fără aplicarea frânelor. Acest lucru permite reluarea procesului.
Cubic-S: funcția de oprire de urgență
Această funcție este compatibilă cu circuitul de oprire de urgență. Oprește robotul imediat la primirea unui semnal de intrare. Această încetare a funcționării robotului poate avea loc în două moduri. Când doriți să reporniți robotul, nu este suficient să dezactivați semnalul de oprire de urgență, trebuie să resetați suplimentar eroarea.
„0” – alimentarea cu energie a motoarelor este deconectată și frânele sunt aplicate.
„1” – oprire controlată, urmată de oprirea motoarelor și aplicarea frânelor.
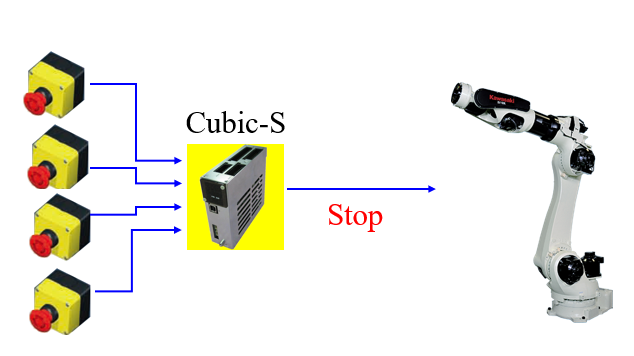
Imaginea prezintă butonul de oprire de urgență. După apăsarea acestui buton, robotul Kawasaki Robotics este oprit imediat.
Cubic-S: funcția de ieșire a stării de siguranță
Este posibilă ieșirea ieșirilor de siguranță în funcție de starea funcțiilor 1-7 Cubic-S și a intrărilor de siguranță descrise mai sus. Funcția de ieșire de siguranță poate controla dispozitive externe, de ex. un șurub, și poate trimite semnale către PLC-ul de siguranță.
Cubic-S poate activa sau dezactiva condiționat o zonă în care robotul se poate sau nu se poate mișca. Figura arată că operatorul a traversat cortina primei stații, adică zona interzisă pentru robot. Dacă robotul ar încerca să facă o mișcare acolo, Cubic-S îl va opri în această zonă. Este de reținut că robotul nu va schimba traiectoria – dacă o zonă de pe traseul său a fost marcată ca interzisă, robotul se va opri.
Rezumat
Există 8 funcții de siguranță din care puteți alege în modulul Cubic-S. Funcțiile pot fi activate sau dezactivate în funcție de intrările și ieșirile de siguranță. Alegerea opțiunilor adecvate Cubic-S pentru roboții Kawasaki, vă oferă o siguranță mai mare atunci când lucrați cu aceste dispozitive. Vă rugăm să rețineți că această opțiune este un modul principal (master) pentru toate celelalte module.
Sursa: *Filmul creat pe baza materialului pregătit de distribuitorul italian Kawasaki Robotics. Materiale interne ASTOR și Kawasaki Robotics CEE HUB.


