Joanna Kowalkowska
2014-05-26
Historie sukcesu
Robot Kawasaki Robotics wspiera projekty studenckie na Wydziale Mechanicznym Politechniki Lubelskiej
Robot Kawasaki Robotics wspiera projekty studenckie na Wydziale Mechanicznym Politechniki Lubelskiej
Wydział Mechaniczny jest najstarszym wydziałem Politechniki Lubelskiej. Jego misją jest interdyscyplinarne kształcenie studentów w sposób zapewniający nabycie wiedzy i umiejętności kreowania twórczych rozwiązań, w powiązaniu z nauką, rozwojem technicznym, we współpracy z gospodarką i społeczeństwem oraz w zgodzie ze standardami międzynarodowymi i poziomem współczesnej cywilizacji.
Wydział Mechaniczny dąży do realizacji badań naukowych na najwyższym poziomie, ukierunkowanych na zapotrzebowanie przemysłu, umożliwiając swoim pracownikom i doktorantom wszechstronny rozwój, pokazując najlepsze wzorce, gromadząc najlepszą aparaturę, rozwijając narzędzia i metody.
Wyzwania
Dzięki funduszom unijnym uczelni udało się zbudować Centralne Laboratorium Wdrożeń. Jego celem jest usprawnienie dydaktyki oraz wymiana doświadczeń pomiędzy poszczególnymi wydziałami Politechniki Lubelskiej. Szeroka gama urządzeń pozwala kształcić studentów zgodnie z aktualnie panującymi trendami rozwoju rynku pracy. Mają oni dostęp do nowoczesnych technologii podnoszących ich kwalifikacje oraz pozycję na rynku pracy.

Jak wyglądała realizacja stanowiska zrobotyzowanego?
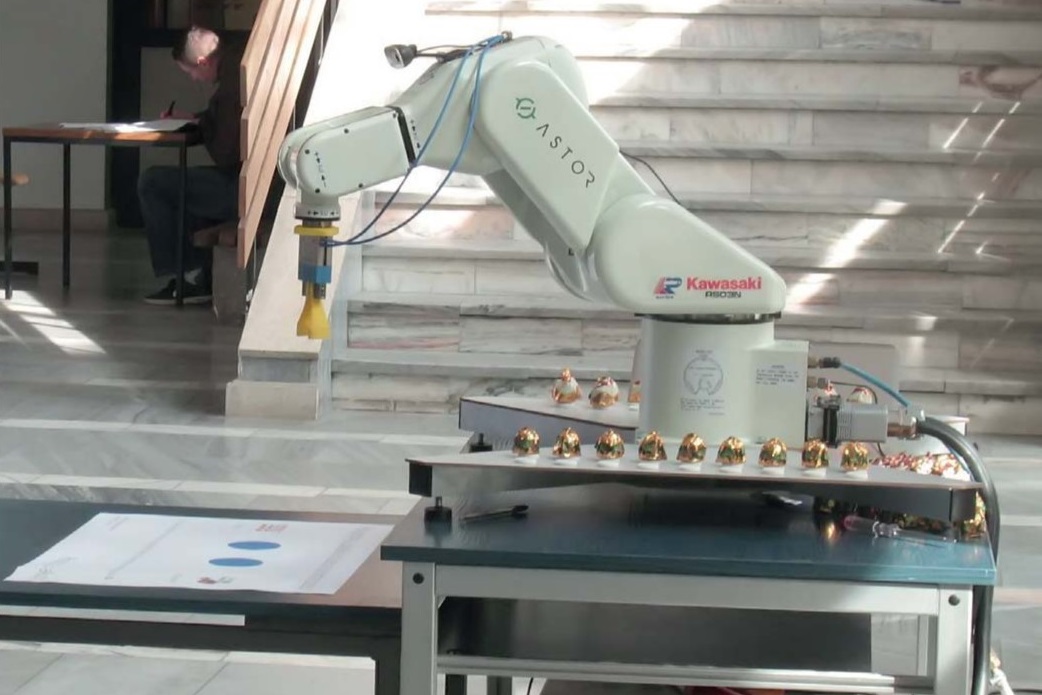
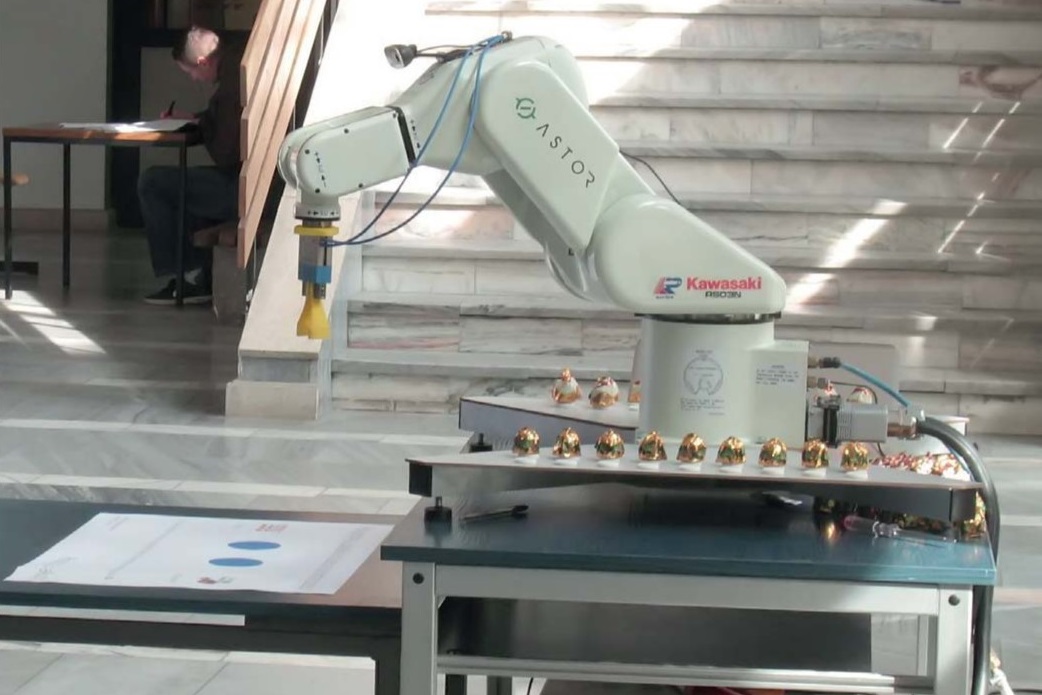
W ramach rozbudowy Katedry Automatyzacji w 2014 roku zakupiony został robot przemysłowy Kawasaki RS003N z firmy ASTOR. Wraz z manipulatorem firma dostarczyła dedykowany chwytak szczękowy oraz oprogramowanie symulacyjne.
Wykorzystując dostarczone urządzenia, studenci Politechniki Lubelskiej przygotowali zrobotyzowane stanowisko demonstracyjne, którego wstępny projekt zrealizowany został w środowisku programistyczno – symulacyjnym K-Roset.
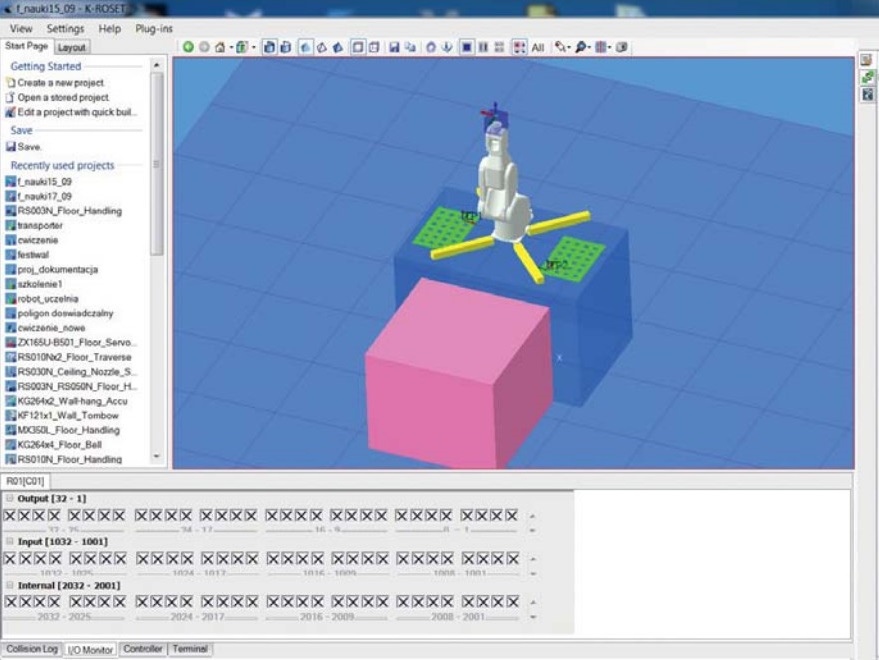
Oprogramowanie umożliwia weryfikację zasięgu, czasu cyklu oraz testy przygotowanej aplikacji. Aby urealnić symulację, możliwe jest zaimportowanie obiektów w postaci plików CAD w formacie .stl.
Manipulator połączony został z systemem wizyjnym, który oprogramowano w języku Python z wykorzystaniem biblioteki OpenCV. Za projekt i wykonanie algorytmu dla systemu wizyjnego odpowiadał inż. Krystian Łygas.
Aby uatrakcyjnić wygląd stanowiska, studenci Wydziału Mechanicznego przygotowali podstawę mocującą robota, pola pobrania oraz odłożenia części, którymi zostały słodycze. Podczas pokazów stanowisko odwiedzane było zarówno przez studentów, jak również licznych „młodszych pasjonatów robotyki”. Cukierki były na tyle uniwersalnym produktem, że każda osoba, która widziała pracującą aplikację, mogła zwizualizować sobie zastosowanie robota w zakładach przetwórstwa spożywczego, a przy odrobinie wyobraźni, również w innych gałęziach przemysłu.
Stanowisko przygotowali studenci inż. Wojciech Danilczuk oraz inż. Krystian Łygas. Opiekunem merytorycznym projektu był dr inż. Radosław Cechowicz.
Korzyści z rozwiązania
W przyszłości planowane jest zaimplementowanie algorytmu pobierania detalu nie spozycjonowanego oraz wizji dynamicznej – tzn. przechwycenie obiektu w ruchu.
Stanowisko jest stale modernizowane i dostosowane do różnego rodzaju aplikacji. Zakup robota Kawasaki umożliwił studentom dostęp do nowoczesnych technologii oraz dał możliwość rozwoju umiejętności praktycznych. Tym samym pozwolił skrócić czas wdrożenia studentów na rynek pracy po ukończeniu uczelni wyższej.
Stanowisko zaprezentowane zostało m.in. na Lubelskim Festiwalu Nauki 2014, gdzie zdobyło nagrodę dla najlepszego projektu studenckiego.
współpraca:
inż. Wojciech Danilczuk
Politechnika Lubelska
Wydział Mechaniczny, Katedra Automatyzacji wojciech.danilczuk@pollub.edu.pl