Sterowanie serwonapędami Astraada SRV z użyciem sieci EtherCAT i ich programowanie w PLC open
Kontakt w sprawie artykułu: Kamil Zajdel - 2017-03-15

Z tego artykułu dowiesz się:
- Jakie są warianty pracy serwonapędu
- Czym charakteryzuje się sterowanie w trybie niezależnej pracy osi
- Jakie możliwości daje sterowanie w trybie pracy w sprzężeniu
Programowanie ruchów serwonapędów odbywa się w takim przypadku w środowisku Codesys. W zależności od potrzeb programistycznych, można wybrać jeden z trzech wariantów:
1. niezależna praca osi
Do sterownika Astraada One można dołączyć jedną lub wiele osi. Ich praca będzie niezależna, tzn. nie będzie synchronizacji pomiędzy osiami. Będzie można natomiast zadawać moment rozpoczęcia ruchu dla poszczególnych osi, włącznie z budowaniem sekwencji takich załączeń.
2. praca osi w sprzężeniu
Osie mogą pracować synchronicznie w sprzężeniu nadążnym (follower) lub jako elektroniczna krzywka CAM. Taka praca osi będzie możliwa po zakupieniu licencji Soft Motion (jest ona kupowana per sterownik).
3. praca w sprzężeniu z uwzględnieniem kinematyki maszyny
Ułatwia programowanie zespołów serwonapędów, ponieważ uwzględnia model kinematyczny maszyny. Program na ruchy wykonywane przez serwonapędy może być napisany w języku G-code. Ten wariant wymaga zakupienia licencji Soft Motion + CNC.
W niniejszym artykule omówione zostaną pokrótce pierwsze dwa warianty sterowania, jako najczęściej stosowane w różnorodnych aplikacjach.
1. Niezależna praca osi
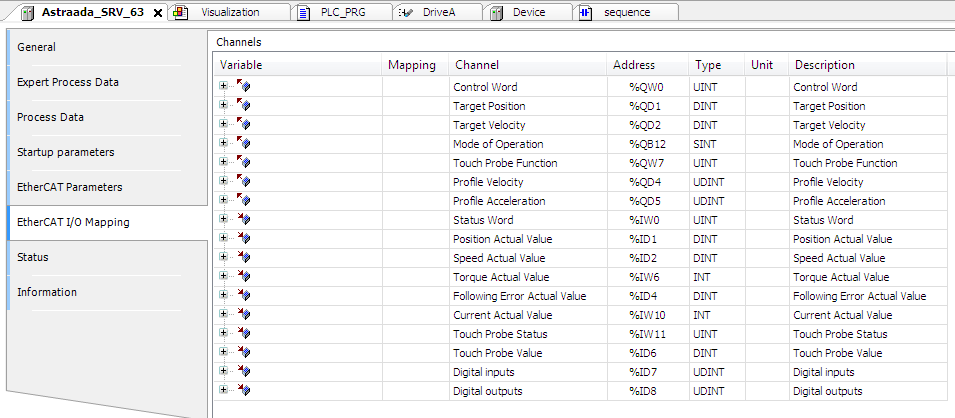
Jedyne, co potrzebujemy aby rozpocząć pracę z serwonapędami w tym trybie, to uruchomić komunikację EtherCAT pomiędzy sterownikiem Astraada One a serwonapędem Astraada SRV. A więc, w konfiguracji sterownika należy uaktywnić port EtherCAT Master, a następnie dodać urządzenie podrzędne, którym jest serwonapęd. Aby to zrobić, potrzebna będzie biblioteka definiująca listę parametrów, jakie mogą być wymieniane pomiędzy sterownikiem a serwonapędem (jest ona dostępna bezpłatnie w dziale Wsparcie na www.astor.com.pl lub na platforma.astor.com.pl). Z listy parametrów należy wybrać te, które są niezbędne do napisania programu sterującego pracą serwonapędu, a następnie napisać ten program.
Te parametry, które będą jednokrotnie załadowane określoną wartością (np. tryb pracy OPERATION MODE) wystarczy dodać na listę parametrów STARTUP PARAMETERS – dzięki temu nie będą musiały być wciąż wymieniane z serwonapędem i nie będą niepotrzebnie obciążać łącza komunikacyjnego. Reszta parametrów wybranych z biblioteki będzie czytana i zapisywana cyklicznie.

2. Praca w sprzężeniu; użycie biblioteki Soft Motion i programowanie w PLC open
Jest to rozwinięcie wcześniej opisanego sposobu sterowania. Pisząc program będziemy tym razem posługiwali się biblioteką Soft Motion. Zawiera ona bloki funkcyjne umożliwiające programowanie serwonapędów zgodne ze standardem PLC open. Oprócz bloków programowych, w ramach tej biblioteki dostępne są również obiekty wizualizacyjne do wspomnianych bloków funkcyjnych, co czyni proces programowania szybszym i łatwiejszym. Nic nie stoi jednak na przeszkodzie, aby samemu stworzyć własne obiekty do wizualizacji pracy serwonapędu.
Podczas programowania serwonapędów bloki te mogą zostać użyte w różnych językach: drabinkowym (LD), tekście strukturalnym (ST) czy też diagramie bloków funkcyjnych (FBD).
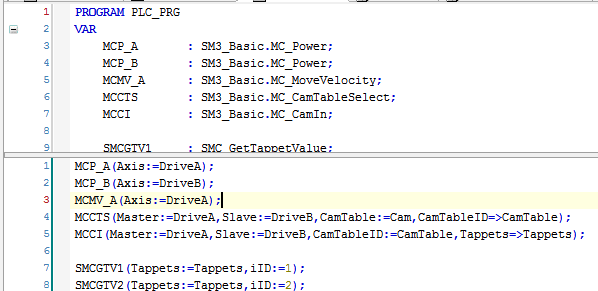
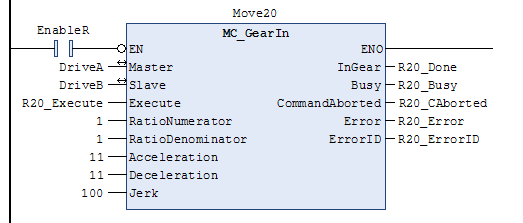
Wśród bloków funkcyjnych znajdziemy także takie, które umożliwiają prace osi w sprzężeniu nadążnym, tj. MC_GearIn oraz MC_GearOut, a także zapewniają realizację elektronicznej krzywki CAM: MC_CamTableSelect, MC_CamIn, MC_CamOut. Użycie bloków funkcyjnych z biblioteki Soft Motion znacząco ułatwia tworzenie sekwencji ruchów.
Zastosowanie sieci komunikacyjnej EtherCAT do sterowania serwonapędami pozwala na dość szybkie sterowanie ich pracą, bowiem okres wymiany danych z serwonapędem można ustawić nawet na 250 mikrosekund.
Z kolei użycie biblioteki Soft Motion jest nieocenione, a nawet nieodzowne w przypadku, gdy osie mają pracować w sprzężeniu. Co ciekawe, taką funkcjonalność można uzyskać niezależnie od zastosowanych serwonapędów, byleby tylko potrafiły się one komunikować z nadrzędnym sterownikiem w protokole EtherCAT, a lista wymienianych danych była zgodna ze standardem CiA DS402.
Takie podejście pozwala na uzyskanie synchronizacji osi zbudowanych na przykład na bazie ekonomicznych serwonapędów serii Astraada SRV. Dla takiego właśnie rozwiązania firma ASTOR przygotowała dla Klientów gotowe, przykładowe projekty w środowisku CodeSys.
Jesteśmy przekonani, że zadbanie o zgodność ze standardami: programowania w PLC open oraz komunikacji CiA DS402 wpłynie na zwiększenie zadowolenia użytkowników serwonapędów Astraada SRV.