Najczęściej stosowane tryby pracy serwonapędów na przykładzie Astraada SRV
Kontakt w sprawie artykułu: Wojciech Trojniar - 2016-11-09

Z tego artykułu dowiesz się:
- Jakie są tryby pracy serwonapędów
- Na czym polega sterowanie sygnałem analogowym +/-10 V
- Jak odbywa się praca w trybie follower
- Przeczytasz o komunikacji i sterowaniu w protokole Modbus RTU
Przyjrzyjmy się pokrótce każdemu z nich, zwracając uwagę na ich zastosowania.
Klasyczne sterowanie sygnałem analogowym +/-10 V
Jest to tryb sterowania, w którym prędkość serwonapędu lub moment siły zadaje się za pomocą sygnału +/-10 V. Może on pochodzić ze sterownika PLC, przetwornika lub wręcz z prostego zadajnika potencjometrycznego. Przykładem najprostszego zastosowania może być sterowanie prędkością taśmociągu lub wózka transportowego ze sprzężeniem zwrotnym; w razie zwiększenia obciążenia serwonapęd za pomocą pętli sprzężenia zwrotnego skompensuje moment siły.
Zaletą takiego trybu sterowania jest prostota rozwiązania, co oznacza, że do sterowania wystarczy prosty mały sterownik z wyjściem napięciowym +/-10 V, a i tak będzie spora elastyczność takiego rozwiązania. Sterownik wszak jest urządzeniem swobodnie programowalnym i można umieszczać w nim przeróżne algorytmy sterowania osią.
Do ułomności takiego rozwiązania należy zaliczyć podatność na szumy i zakłócenia oraz wpływ niedokładności wynikającej z przesunięcia sygnału w torze analogowym. Okazuje się, że przy zerowym napięciu oś zaczyna powolutku poruszać się. Dlatego w serwonapędzie przewidziany jest specjalny rejestr P3.20, w którym można skonfigurować przesunięcie (offset) dla sygnału wejściowego, który skompensuje takie przesunięcie (bias). Wejście do zadawania prędkości ma 16-bitowy przetwornik, a wejście do zadawania momentu siły wyposażono w 12-bitowy przetwornik o impedancji wejściowej 10 kOhm.
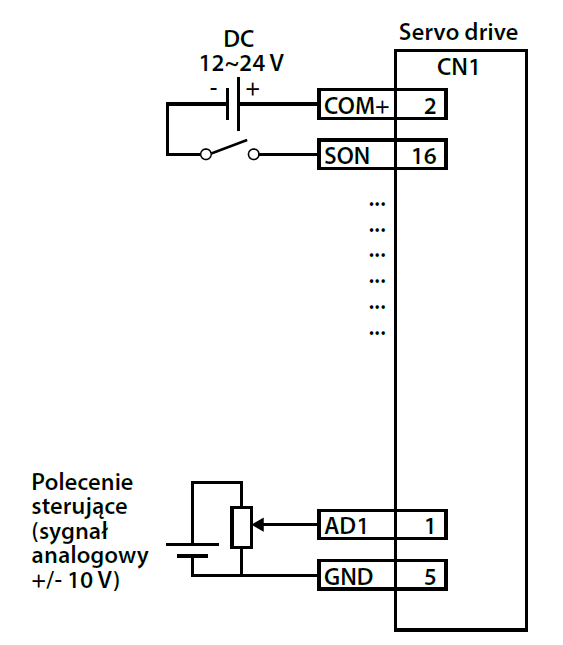
Skonfigurowanie serwonapędu, przykładowo do pracy w trybie kontroli prędkości, polega na wybraniu trybu sterowanie prędkością (P0.03 = 1) oraz wybraniu źródła sygnału analogowego; dla wybrania wejścia pierwszego należy wpisać P0.40 = 1. Załączenie kontroli nad serwonapędem przez pierwsze wejście analogowe odbywa się przez wpisanie wartości 3 do rejestru P3.26. Można również skonfigurować współczynnik wzmocnienia oraz filtrowanie sygnału analogowego. Prezentowany schemat podłączeń dotyczy właśnie trybu sterowania prędkością.
Praca w trybie follower, współpraca z zewnętrznym enkoderem
Praca z zewnętrznym enkoderem może być użyteczna na przykład w celu uzyskania sprzężenia osi serwonapędu z nadrzędną osią maszyny. Oś serwonapędu podąża wtedy za ruchem osi nadrzędnej. Jest to dość ciekawa funkcjonalność, jak na serwonapędy ekonomicznej serii. Zewnętrzny enkoder można podłączyć do serwonapędu przy wykorzystaniu wejść PULS i SIGN.
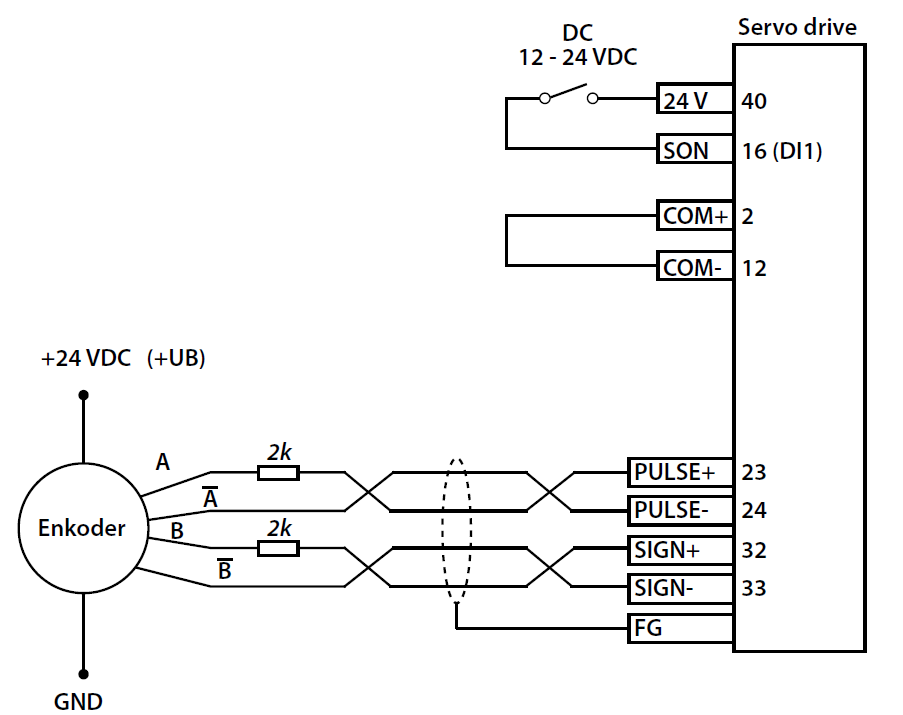
Wejścia te przygotowane są do pracy przy napięciu +/- 5V, dlatego przy korzystaniu z zasilania o wyższym napięciu (np. 24 VDC) należy dodać rezystory o oporności 2 kiloomy, w celu ograniczenia prądu. Programista winien określić stopień sprzężenia serwonapędu z enkoderem zewnętrznym. Robi to w postaci liczby będącej ułamkiem, którego licznik wpisuje do parametru P0.25, a mianownik do P0.26.
Komunikacja i sterowanie w protokole Modbus RTU
W aplikacjach, w których parametry ruchu są zmienne i w zasadzie zawsze przed rozpoczęciem kolejnego cyklu produkcyjnego określane są najpierw przez operatora, można pokusić się o zastosowanie panelu operatorskiego (np. Astraada HMI) połączonego z serwonapędem przy pomocy łącza RS485. Przy czym łącze RS485 umożliwia w razie potrzeby podłączenie wielu serwonapędów do panelu, co jest cenne w przypadku maszyn wieloosiowych.
Taki sposób sterowania pracą serwonapędu charakteryzuje niska cena oraz duża elastyczność. Do wspomnianego sterowania, a właściwie zadawania parametrów ruchu wystarczy jedynie panel operatorski, a więc nie jest konieczny sterownik PLC. Pamiętać jednak należy o tym, że łącze szeregowe nie zapewnia dużej przepustowości komunikacyjnej, a więc raczej nie należy nastawiać się na sterowanie pracą serwonapędu za pomocą tego łącza w sensie kontroli i korekty parametrów ruchu w locie, lecz raczej na zadawanie parametrów ruchu do zrealizowania i wydawanie komendy „wykonaj”.
Dokumentacja do serwonapędów Astraada SRV zawiera listę adresów w protokole Modbus RTU, umożliwiających dostęp do parametrów wzmacniacza. Przykładowo, zadawanie pozycji odbywa się przez wpisanie wartości żądanej pozycji do rejestru o adresie HR1824 (jest to parametr P4.12 we wzmacniaczu).
Za pomocą łącza komunikacyjnego w protokole Modbus RTU sterować można serwonapędem w różnych trybach, np. sterowanie pozycją lub sterowanie prędkością. Najpierw jednak należy załączyć zezwolenie na takie sterowanie, co odbywa się przez wpisanie wartości 1 do rejestru P4.10 (adres w protokole Modbus RTU: HR1820). Załączenie serwonapędu może odbyć się też za pomocą tego łącza – poprzez wpisanie wartości 1 do rejestru P4.11 (adres w protokole Modbus RTU to HR1822).
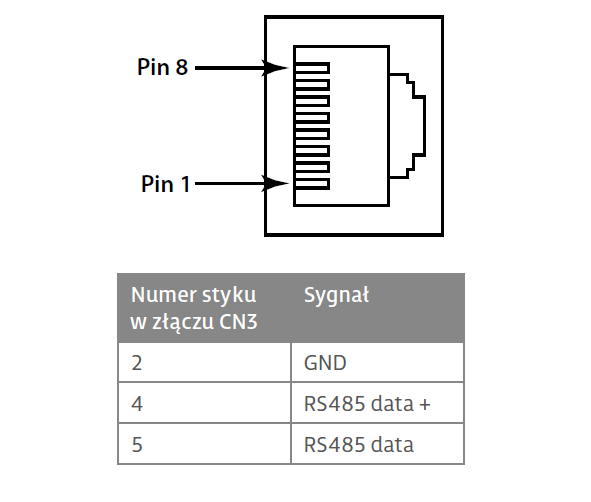
Komunikacja Modbus RTU odbywa się poprzez port komunikacyjny RS485, oznaczony na serwonapędzie jako CN3. Ma on linie służące do transmisji 2-przewodowej. W razie potrzeby można łatwo przejść z takiego łącza na Ethernet i protokół Modbus TCP, po zastosowaniu konwertera AST-CON-485E.
Inne tryby pracy
Niniejszy artykuł nie wyczerpuje tematyki sterowania serwonapędami Astraada SRV, bowiem oprócz wspomnianych trybów dość często używane są np. sterowanie sygnałami „impulsy i kierunek” (PULSE + SIGN), czy też sterowanie z udziałem sieci komunikacyjnej EtherCAT.